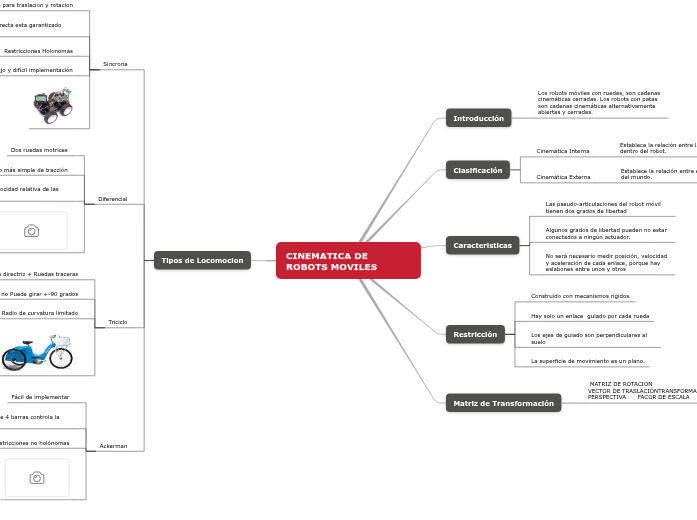
CINEMATICA DE ROBOTS MOVILES
Introducción
Los robots móviles con ruedas, son cadenas cinemáticas cerradas. Los robots con patas son cadenas cinemáticas alternativamente abiertas y cerradas.
Clasificación
Cinemática Interna
Establece la relación entre las articulaciones dentro del robot.
Cinemática Externa
Establece la relación entre el robot y el resto del mundo.
Caracteristicas
Las pseudo-articulaciones del robot móvil tienen dos grados de libertad
Algunos grados de libertad pueden no estar conectados a ningún actuador.
No será necesario medir posición, velocidad y aceleración de cada enlace, porque hay eslabones entre unos y otros
Restricción
Construído con mecanismos rígidos.
Hay solo un enlace guiado por cada rueda
Los ejes de guiado son perpendiculares al suelo
La superficie de movimiento es un plano.
Matriz de Transformación
MATRIZ DE ROTACION VECTOR DE TRASLACIÓNTRANSFORMACIÓN PERSPECTIVA FACOR DE ESCALA
Tipos de Locomocion
Síncrona
Motores separados para traslacion y rotacion
El control en linea recta esta garantizado mecanicamente
Restricciones Holonomas
Diseño complejo y difícil implementación

Diferencial
Dos ruedas motrices
Tipo más simple de tracción
Muy sencible a la velocidad relativa de las ruedas

Triciclo
Rueda directriz + Ruedas traceras
no Puede girar +-90 grados
Radio de curvatura limitado

Ackerman
Fácil de implementar
Un sistema simple de 4 barras controla la dirección
Restricciones no holónomas