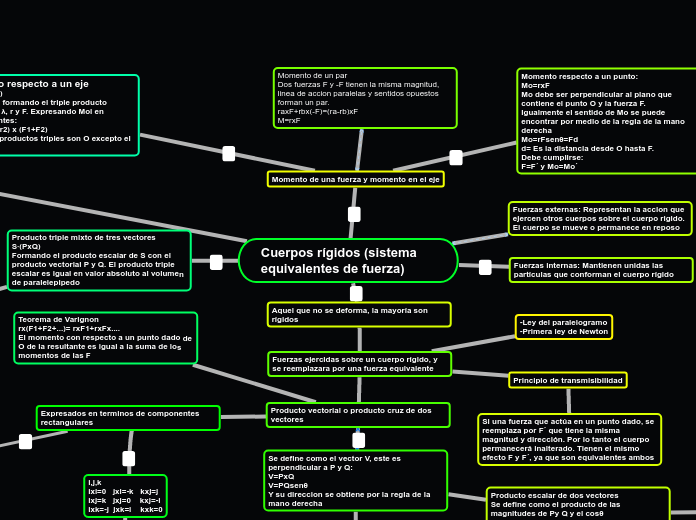
Fuerzas externas: Representan la accion que ejercen otros cuerpos sobre el cuerpo rigido. El cuerpo se mueve o permanece en reposo
Fuerzas internas: Mantienen unidas las partículas que conforman el cuerpo rígido
Momento respecto a un punto: Mo=rxF Mo debe ser perpendicular al plano que contiene el punto O y la fuerza F. Igualmente el sentido de Mo se puede encontrar por medio de la regla de la mano derecha Mo=rFsenθ=Fd d= Es la distancia desde O hasta F. Debe cumplirse: F=F´ y Mo=Mo´
Momento de un par Dos fuerzas F y -F tienen la misma magnitud, linea de accion paralelas y sentidos opuestos forman un par. raxF+rbx(-F)=(ra-rb)xF M=rxF
Fuerzas ejercidas sobre un cuerpo rígido, y se reemplazara por una fuerza equivalente
Producto vectorial o producto cruz de dos vectores
Se define como el vector V, este es perpendicular a P y Q: V=PxQ V=PQsenθ Y su direccion se obtiene por la regla de la mano derecha
Si PyQ tienen igual direccion o direcciones opuestas se cumple: V=0
Expresados en terminos de componentes rectangulares
Se ordenan en un circulo y se puede saber el signo del producto vectorial
V=PxQ V=(Pxi,Pyi,Pzk) x (Qxi,Qyj,Qzk)
Teorema de Varignon rx(F1+F2+...)= rxF1+rxFx.... El momento con respecto a un punto dado de O de la resultante es igual a la suma de los momentos de las F
Producto triple mixto de tres vectores S·(PxQ) Formando el producto escalar de S con el producto vectorial P y Q. El producto triple escalar es igual en valor absoluto al volumen de paralelepipedo
Su signo es: Negativo y positivo por el metodo de la ley de la mano derecha
Momento respecto a un eje Mol=λ·(rxF) Se obtiene formando el triple producto escalar de λ, r y F. Expresando Mol en determinantes: Mol=λ·(r1+r2) x (F1+F2) Todos los productos triples son O excepto el ultimo
-Ley del paralelogramo -Primera ley de Newton
Principio de transmisibilidad
Si una fuerza que actúa en un punto dado, se reemplaza por F´ que tiene la misma magnitud y dirección. Por lo tanto el cuerpo permanecerá inalterado. Tienen el mismo efecto F y F´, ya que son equivalentes ambos
Producto escalar de dos vectores Se define como el producto de las magnitudes de Py Q y el cosθ P·Q= PQcosθ P·Q= Q·P
Se expresa como la suma de Productos escalares
Pares equivalentes El único movimiento que un par puede impartir a un cuerpo rígido es una rotación
Dos fuerzas equivalentes si pueden transformar a uno de ellos en el otro, por medio de reemplazar fuerzas, descomponer a una fuerza, cancelar dos fuerzas iguales, unir la misa fuerza o mover una fuerza
Adicción o suma de pares Se puede suponer, que el par P1 consta de dos fuerzas F1 y -F1. Entonces se supone que el P2 consta de F2 y -F2 M=rxR=rx(F1+F2) Por el teorema de Varignon M= rxF1+rxF2 Entonces: M=M1+M2
Sistemas equipolante Cuando respectivamente sus resultados y sus momentos resultantes con respecto a O son iguales
Se pueden representar por medio de vectores Es suficiente dibujar una flecha igual en magnitud y direccion al momento de M del par. El vector M se puede descomponer como Mx, My, Mz
Descomposición de una fuerza dada en una fuerza en O y un par
Pueden unirse dos fuerzas al punto O, una igual a F y otra igual a -F, sin modificar el efecto que la fuerza original tiene sobre el cuerpo rigido Mo´=Mo+SxF
Reducción de un sistema de fuerzas a una fuerza y un par
Los vectores de M1, M2, M3 pueden sumarse vectorialmente y ser reemplazada por un solo vector Mor. Cualquier sistema puede ser reducido a un sistema equivalente fuerza- par que actúa en el punto. R=ΣF Mor=ΣMo= Σ(rxF)
Fuerzas equivalentes
Dos fuerzas son equivalentes si pueden ser reducidas al mismo sistema fuerza- par en un momento dado. Expresado en forma matematica: ΣF=ΣF´ Y ΣMo= ΣM´o
Reducción de un sistema de fuerzas a una llave de torsión
Se le conoce debido a que la combinación resultante de empuje y torsión es la misma que produce una llave de la torsión real