Tipos de robots
Clasificación
Morfologia
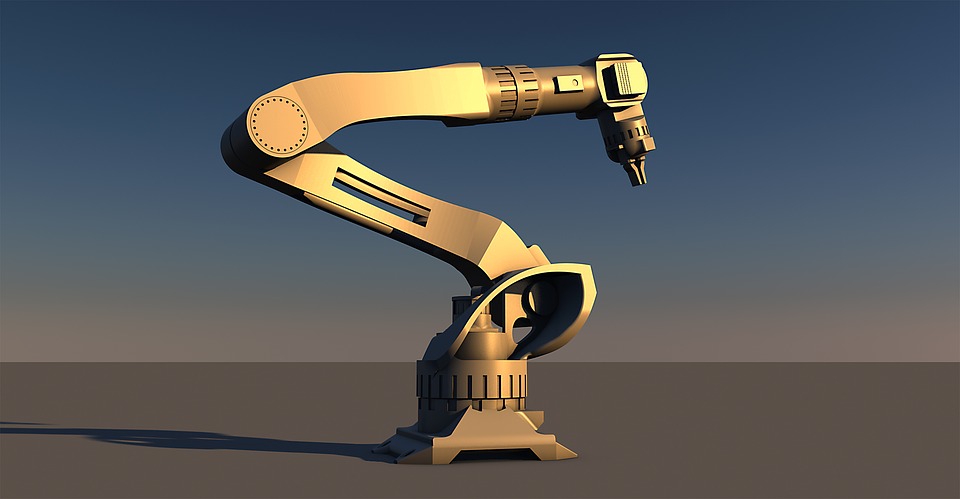
Manipuladores poliarticulados
brazos de robot sedentarios,
configurados para mover sus elementos terminales
Móviles
Provistos de ruedas, orugas o extremidades que les permiten desplazarse de
acuerdo a la información que reciben a través de sus sistemas de sensores y a suprogramación.

Procedimiento de control
No servo-controlados
Son aquéllos en los que cada parte móvil tiene un número fijo de
posiciones con topes,
Suelen ser de tipo neumático y resultan considerablemente rápidos y precisos.
Servo-controlados
Cada elemento móvil cuenta con un sensor de posición, lineal o angular.
Pueden ser detenidos en cualquier punto.
Servo-controlados punto a punto
Para controlarlos únicamente se les indican las posiciones
inicial y final de la trayectoria.
Son capaces de memorizar posiciones.

Aplicacion
Clasificación
Producción industrial
Manofactura de productos
Pueden ser de manipulación (en fundición, moldeado, forja, tratamientos térmicos, etc.), de soldadura, pintura, mecanizado, montaje, almacenamiento y control de calidad.
De servicio
tipos de servicio
A humanos
Medicina
descarga al cirujano de ciertas tareas mecánicas
Seguridad
Entretenimiento
Al equipamiento
Mantenimiento
Reparación
Limpieza
Otras
Investigación y exploración
usan para obtener datos acerca de zonas
desconocidas, peligrosas o inaccesibles por medios tradicionales.
Transporte