
CONTROL Y ROBÓTICA
CONTROL PROGRAMADO
CONTROL MEDIANTE ORDENADOR

TARJETA CONTROLADORA
PROGRAMA
LENGUAJES DE PROGRAMACIÓN
C
JAVA
PROCESSING
ELABORACIÓN DEL PROGRAMA
DIAGRAMAS DE FLUJO
SÍMBOLOS
IDE
PROGRAMACIÓN POR BLOQUES
EASYARDUINO
BITBLOQ
VISUALINO
S4A
EL ORDENADOR: ELEMENTO DE PROGRAMACIÓN Y CONTROL
ENTRADAS ANALÓGICAS
ENTRADAS DIGITALES
ROBOTS
ARQUITECTURA DE UN ROBOT
SENSORES
SENSORES QUE MIDEN EL ESTADO INTERNO DEL ROBOT
SENSORES QUE RECOGEN INFORMACIÓN DEL ENTORNO EXTERIOR
ACTUADORES

MOTORES

RELÉS

ACCIONADORES HIDRÁULICOS Y NEUMÁTICOS
ALIMENTACIÓN

BATERÍAS
CÉLULAS FOTOVOLTAICAS
APLICACIONES
TAREAS DE MUCHO ESFUERZO
TAREAS REPETITIVAS
TRABAJOS DE RIESGO PARA LA VIDA DE LAS PERSONAS
PARA ENTORNOS DE DIFÍCIL ACCESO
ROBOTS INDUSTRIALES
TIPOS
ANDROIDES Y ZOOMÓRFICOS
MÓVILES
NANOROBOTS
INDUSTRIALES
PROGRAMACIÓN DE ROBOTS
ACTUADORES
MOTORES PASO A PASO
IMPRESORAS
ESCÁNERES
LECTORES DVD
MOTORES DE CORRIENTE CONTINUA
SERVOMOTORES
DE ÁNGULO
DE GIRO COMPLETO O MOVIMIENTO LIBRE
PROGRAMACIÓN
OTROS SENSORES
ULTRASONIDOS
SENSORES DE POSICIÓN ÓPTICOS
MANDOS DE CONTROL REMOTO
SISTEMAS DE ALARMA
LECTOR DE CÓDIGO DE BARRAS
RATONES DE ORDNADOR
SENSORES
SENSORES ANALÓGICOS
TERMISTORES
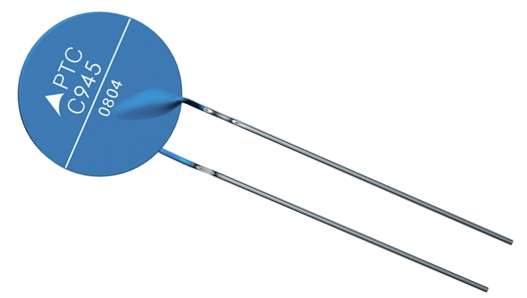
TERMISTORES PTC

TERMISTORES NTC
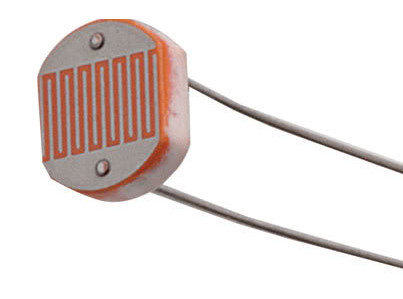
RESISTENCIAS LDR
SENSORES DE HUMEDAD
SENSORES DIGITALES
INTERRUPTOR DE FIN DE CARRERA
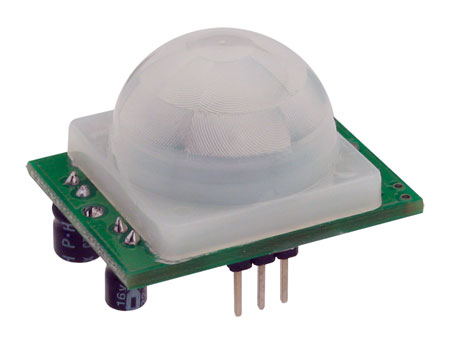
SENSOR DE PRESENCIA PIR

INTERRUPTOR MAGNÉTICO DE PROXIMIDAD
SENSOR DE INCLINACIÓN
PULSADOR
OTROS SENSORES
SENSOR DE TEMPERATURA LM35

SENSOR DE POSICIÓN
TIPOS DE SISTEMAS DE CONTROL
CONTROL ELECTROMECÁNICO

INTERRUPTOR DE FINAL DE CARRERA
CONTROL ELÉCTRICO
SISTEMAS DE CONTROL
ESTRUCTURA
SENSOR
CONTROLADOR
MECANISMO
TIPOS DE SISTEMAS
EN LAZO ABIERTO

RELOJ

SEMÁFORO
TOSTADORA DE PAN
EN LAZO CERRADO
CISTERNA DE AGUA
SISTEMAS AUTOMÁTICOS DE ILUMINACIÓN