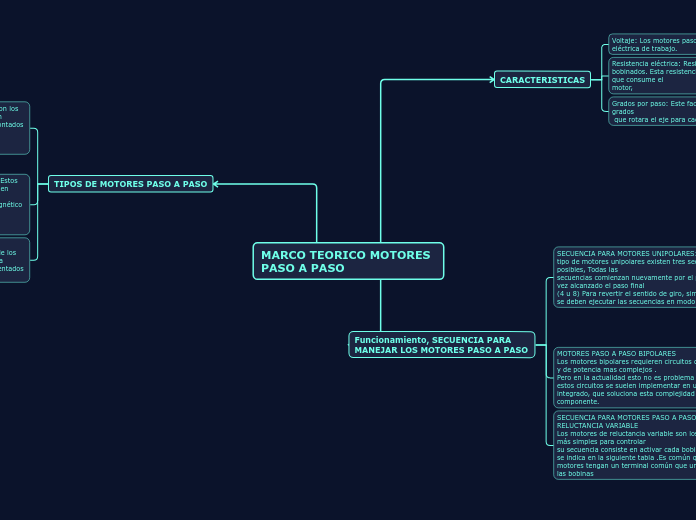
MARCO TEORICO MOTORES PASO A PASO
CARACTERISTICAS
Voltaje: Los motores paso a paso tienen una tensión eléctrica de trabajo.
Resistencia eléctrica: Resistencia de los
bobinados. Esta resistencia determinara la corriente que consume el
motor,
Grados por paso: Este factor define la cantidad de grados
que rotara el eje para cada caso completo.
Funcionamiento, SECUENCIA PARA MANEJAR LOS MOTORES PASO A PASO
SECUENCIA PARA MOTORES UNIPOLARES: Para este tipo de motores unipolares existen tres secuencias posibles, Todas las
secuencias comienzan nuevamente por el paso 1 una vez alcanzado el paso final
(4 u 8) Para revertir el sentido de giro, simplemente se deben ejecutar las secuencias en modo inverso.
Secuencia de paso completo doble : (Secuencia normal) esta secuencia es la mas usada y es la que recomienda el fabricante. En esta secuencia el motor avanza un paso por vez.
Secuencia de paso completo básica (wive drive): Consiste en activar
cada una de las bobinas de forma independiente lo que provoca que el eje
del motor se oriente hacia la bobina activa.
Secuencia de medio paso: En esta secuencia es una combinación de los
anteriores logrando un paso mas corto, en este caso se activan dos
bobinas y luego solo una.
MOTORES PASO A PASO BIPOLARES
Los motores bipolares requieren circuitos de control y de potencia mas complejos .
Pero en la actualidad esto no es problema ya que estos circuitos se suelen implementar en un circuito integrado, que soluciona esta complejidad en un solo componente.
La
configuración de los motores bipolares requiere que las bobinas reciban corriente
en uno y otro sentido, y no solamente un encendido /apagado como en los unipolares . Esto hace necesario de un puente H sobre cada uno de los bobinados.
SECUENCIA PARA MOTORES PASO A PASO DE RELUCTANCIA VARIABLE
Los motores de reluctancia variable son los motores más simples para controlar
su secuencia consiste en activar cada bobina como se indica en la siguiente tabla .Es común que estos motores tengan un terminal común que une todas las bobinas
TIPOS DE MOTORES PASO A PASO
Motores paso a paso de imán permanente: Son los mas usados en el campo de la robótica. Están constituidos por un rotor sobre el que van montados diferentes imanes permanentes y su
estator contiene cierto número de bobinas excitadoras.
UNIPOLAR: Suelen tener 8, 6 o 5 terminales de salida dependiendo de su conexionado interno. Este tipo de motor su control se
hace más sencillo.
BIPOLAR: Estos tienen 4 terminales de salida requieren de un cambio del sentido del flujo de corriente a través de las bobinas en la secuencia
apropiada para realizar el movimiento por esta razón se hace mas complejo su control.
Motores paso a paso de reluctancia variable: Estos motores poseen un rotor de hierro dulce que en condiciones de excitación
del estator y bajo la acción de su campo magnético ofrece menor resistencia al
ser atravesado por su flujo en la posición de equilibrio.
Motores paso a paso Híbridos:
Estos motores combinan las características de los motores de imán permanente y de reluctancia variable. Se construyen con estatores multidentados y un rotor de imán permanente .