ESPACIOS VECTORIALES
Combinación lineal
Sean los vectores v1, v2, v3, ……, vk elementos de un espacio vectorial V, entonces cualquier elemento v de V es combinación lineal
de v1, v2, v3, …… , vk si existen constantes no todas igual a cero (0) tal que:
v = c1v1 + c2v2 + c3v3+ ……. + ckvk
c1, c2, c3, ……, ck constantes
Linealmente dependientes o
independientes
• Los vectores v1, v2, v3, …, vk elementos de un espacio vectorial V son linealmente dependiente si las constantes c1, c2, c3, …, ck NO TODAS
iguales a cero (0)
C1v2 + c2v2 +c3v3 + ……. + ckvk = 0
• Si los únicos valores de c1, c2, c3, …, ck son cero (solución trivial) entonces v1, v2, v3, …, vk son linealmente independientes
c1 = c2 = c3 = … = ck = 0
Generador
Sea s = {v1, v2, v3, ………, vk} un conjunto de vectores, es un espacio vectorial v, entonces el conjunto de todos los vectores en V que son
combinación lineal de v1, v2, v3, …., vk se llama conjunto generador
Gen(s) = gen(v1, v2, v3, ……, vk)
Procedimiento:
Colocar un vector representativo de v por ejemplo:
V = R³
(n1, n2, n3) ∈ V (k1, k2, k3) ∈ V
n1, n2, n3 ∈ R k1, k2, k3 ∈ R
Se encuentran formados por dos conjuntos y dos operaciones. El
primer conjunto contiene los vectores y el segundo conjunto que
se denomina cuerpo es en donde se definen + y x
+: Suma vectorial
X: Producto escalar por un vector
K: Cuerpo
Para que el conjunto del producto U sea un espacio vectorial
real, se debe cumplir dos propiedades con respecto a + y
con respecto a x
1. Sea x, v ∈ V entonces u + v ∈ V cerradura respecto a la suma:
u + v = v + u
u + (v + w) = (u + v) + w
Existe un elemento cero (0) en V tal que: 0 + u = u + 0 = u
Para todo u ∈ V, existe -u ∈ V, tal que: u + (-u) = 0
2. Sea c, d ∈ R, u, v ∈ V cerradura respecto al producto:
c(u + v) = c x u + c x v
(c + d) x u = c x u + d x u
c x (d x u) = (c x d) x u
Existe el 1, talque: 1 x u = u x 1 = u
Teorema
Sea w un espacio vectorial y w subconjunto de V en un espacio vectorial, entonces w se denomina subespacio
vectorial
Sea w un conjunto vacío y v un espacio vectorial con los operadores + y x, entonces w es un espacio vectorial si y
solo si cumple con:
u x v ∈ W; Para todo u, v ∈ W
c x u ∈ W; Para todo u ∈ W, c ∈ W
Base de un espacio vectorial
Construcción de bases ortogonales
y ortonormales
Proceso de construcción Gram
Schmidt
1. Consideramos U1 = V1
U es elemento de la base s no ortogonal
2. vi = ui – (ui x v1/v1 x v1)v1 – (ui x v2/v2 x v2)v2 - (ui x v3/v3 x v3)v3 …. - (ui x v-1/ v-1 x v-1) v-1
Ui es elemento de la base S no ortogonal
V1. V2, V3, …… Vi forman parte de la nueva base ortogonal
3. Una vez obtenidos v1, v2, v3, …, vi -1 que forman parte de la base ortogonal, se construyen
o determinan w1, w2, w3, …, wi-1 elementos de la base ortonormal
W1 = v1/|v1| W2 = v2/|v2| Wi-1 = vi-1/|vi-1|
Unitarios de la base ortonormal
T = {w1, w2, w3, …, wi-1} base ortonormal
Este proceso denominado Gram Schmidt forma una base que no es
ortogonal ni ortonormal para construir de forma interactiva una nueva
base ortogonal y ortonormal, su proceso se fundamenta en diferentes
teoremas
Teorema
• Si s = {u1, u2, u3, …, uk} una base en R^n y v en vector elemento
de R^n, entonces v = c1u1 + c2u2 + c3u3 + …. + ciui + …. + cnun
donde las constantes: Ci = VUi 1 ≤ i ≤ n
Corolario:
Sea S = {u1, u2, u3, …, ui, ….un} una base de R^n y v un vector elevado de R^n, entonces:
• V = c1u1 + c2u2 + c3u3 + …. + ciui + …. + cnun donde las constantes:
Ci = VU1/U1 x U1 1 ≤ i ≤ n
En el que S es una base ortogonal
• Si s = {u1, u2, u3, …, uk} una base en R^n y v en vector elemento
de R^n, entonces v = c1u1 + c2u2 + c3u3 + …. + ciui + …. + cnun
donde las constantes: Ci = VUi 1 ≤ i ≤ n
Los vectores v1, v2, v3, …, vk elementos de un espacio
vectorial V, representan una base de V si cumple dos
condiciones
1. v1, v2, v3, …, vk generen a V
2. v1, v2, v3, …, vk sea
linealmente independientes
Bases ortogonales y ortonormales
en un espacio vectorial
Vector unitario (u): es un vector de “magnitud”, “extensión”, “longitud” 1 (modulo uno)
u = v/|√v|
Bases ortogonales: Sea S ={v1, v2, v3, ….,vk} elementos del espacio vectorial V, S representa base ortogonal
si el producto entre vectores diferentes es cero
• Ortogonal representa perpendicularidad para R² y R³
Bases ortonormales: Sea S = {v1, v2, v3, ….,vk} elementos del espacio vectorial V, S representa a una base
ortonormal de v
Si el conjunto w = { u1, u2, u3, ….., u4} en el que:
- U1: es el conjunto unitario de v1
- U2: es el conjunto unitario de v2
- U3: es el conjunto unitario de v3
- Uk: es el conjunto unitario de vk
Son ortonormales
SIGLO XX
Se encuentran formados por dos conjuntos y dos operaciones. El
primer conjunto contiene los vectores y el segundo conjunto que
se denomina cuerpo es en donde se definen + y x
1. Sea x, v ∈ V entonces u + v ∈ V cerradura respecto a la suma:
u + v = v + u
u + (v + w) = (u + v) + w
Existe un elemento cero (0) en V tal que: 0 + u = u + 0 = u
Para todo u ∈ V, existe -u ∈ V, tal que: u + (-u) = 0
2. Sea c, d ∈ R, u, v ∈ V cerradura respecto al producto:
c(u + v) = c x u + c x v
(c + d) x u = c x u + d x u
c x (d x u) = (c x d) x u
Existe el 1, talque: 1 x u = u x 1 = u
Sea w un espacio vectorial y w subconjunto de V en un espacio vectorial, entonces w se denomina subespacio
vectorial
Sea w un conjunto vacío y v un espacio vectorial con los operadores + y x, entonces w es un espacio vectorial si y
solo si cumple con:
u x v ∈ W; Para todo u, v ∈ W
c x u ∈ W; Para todo u ∈ W, c ∈ W
Transformaciones Lineales (L)
C. Primitivo
Toda va de acuerdo a la necesidad
L: U -> W u -> L(u)
u, w espacios vectoriales
Condiciones para que L sea una
transformación lineal
Sean v, w dos espacios vectoriales; una transformación lineal de v en w es
una función que asigna a cada vector elemento de v un ÚNICO vector
elemento de w, L(u) cumple con las siguientes condiciones:
1. L(u + v) = L(u) + L(v); u, v ∈ V ,
L(u), L(v) ∈ W
2. L(k u) = k(L u); k es un escalar
u ∈ V; L(u) ∈ W
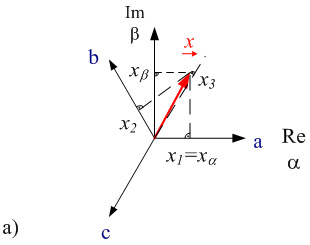
Matriz de rotación
Los ejes x, y son denotadas con el
ángulo \alpha, es decir, el
resultado son dos ejes
perpendiculares pero notados con
un ángulo \alpha.
Px = OB – AB
Px = pu cos α - pu sin α
Py = AA’ + A’P
Py = pu sin α + pu cos α
Luv=cos α-sin αsin α cos αuv= px py