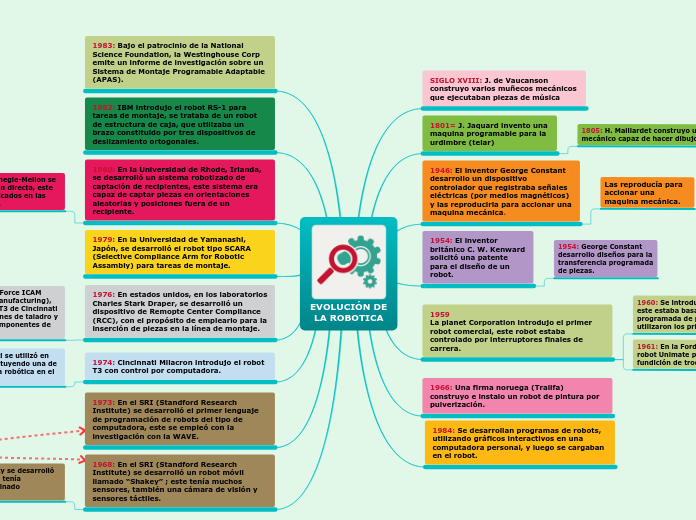

EVOLUCIÓN DE LA ROBOTICA
SIGLO XVIII: J. de Vaucanson construyo varios muñecos mecánicos que ejecutaban piezas de música
1801= J. Jaquard invento una maquina programable para la urdimbre (telar)
1805: H. Maillardet construyo un muñeco mecánico capaz de hacer dibujos.
1946: El inventor George Constant desarrollo un dispositivo controlador que registraba señales eléctricas (por medios magnéticos) y las reproducirla para accionar una maquina mecánica.
Las reproducía para accionar una maquina mecánica.
1954: El inventor británico C. W. Kenward solicitó una patente para el diseño de un robot.
1954: George Constant desarrollo diseños para la transferencia programada de piezas.
1959 La planet Corporation introdujo el primer robot comercial, este robot estaba controlado por interruptores finales de carrera.
1960: Se introdujo el primer robot “Unimate”, este estaba basado en la transferencia programada de piezas, en este proyecto se utilizaron los principios del control numérico.
1961: En la Ford Motors Company se instaló un robot Unimate para atender una máquina de fundición de troquel.
1966: Una firma noruega (Trallfa) construyo e instalo un robot de pintura por pulverización.
1984: Se desarrollan programas de robots, utilizando gráficos interactivos en una computadora personal, y luego se cargaban en el robot.
1983: Bajo el patrocinio de la National Science Foundation, la Westinghouse Corp emite un informe de investigación sobre un Sistema de Montaje Programable Adaptable (APAS).
1982: IBM introdujo el robot RS-1 para tareas de montaje, se trataba de un robot de estructura de caja, que utilizaba un brazo constituido por tres dispositivos de deslizamiento ortogonales.
1980: En la Universidad de Rhode, Irlanda, se desarrolló un sistema robotizado de captación de recipientes, este sistema era capaz de captar piezas en orientaciones aleatorias y posiciones fuera de un recipiente.
1981: En la Universidad de Carnegie-Mellon se desarrolló un robot de impulsión directa, este utilizaba motores eléctricos ubicados en las articulaciones del manipulador.
1979: En la Universidad de Yamanashi, Japón, se desarrolló el robot tipo SCARA (Selective Compliance Arm for Robotic Assambly) para tareas de montaje.
1976: En estados unidos, en los laboratorios Charles Stark Draper, se desarrolló un dispositivo de Remopte Center Compliance (RCC), con el propósito de emplearlo para la inserción de piezas en la línea de montaje.
1978: Bajo el patrocinio de Air Force ICAM (Integrated Computer-Aided Manufacturing), se adaptó y programó el robot T3 de Cincinnati Milacron para realizar operaciones de taladro y circulación de materiales en componentes de aviones.
1978: La UNIMATION introdujo el robot PUMA para tareas de montaje, basándose en diseños obtenidos en un estudio de la General Motors.
1974: Cincinnati Milacron introdujo el robot T3 con control por computadora.
1975: El robot Sigma de Olivetti se utilizó en operaciones de montaje, constituyendo una de las primitivas aplicaciones de la robótica en el montaje.
1973: En el SRI (Standford Research Institute) se desarrolló el primer lenguaje de programación de robots del tipo de computadora, este se empleó con la investigación con la WAVE.
1968: En el SRI (Standford Research Institute) se desarrolló un robot móvil llamado “Shakey” ; este tenía muchos sensores, también una cámara de visión y sensores táctiles.
1971: En la Standford University se desarrolló un pequeño brazo de robot que tenía accionamiento eléctrico denominado “Standford Arm”