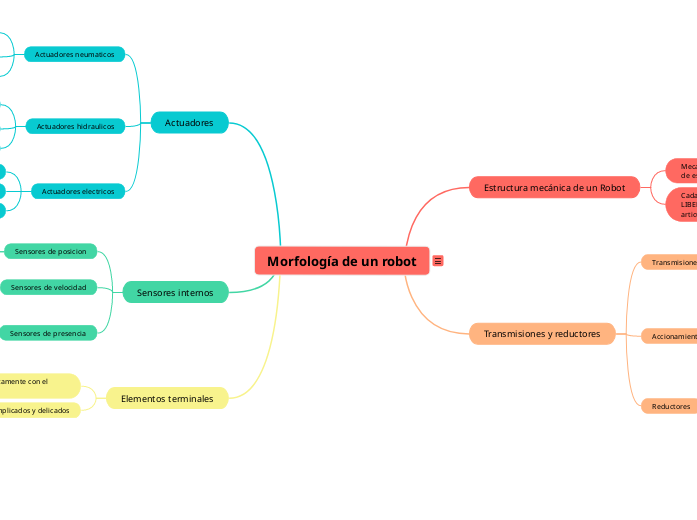
Morfología de un robot
Estructura mecánica de un Robot
Mecanicamente un robot se conforma poruna serie de eslabones unidos mediante articulaciones
Cada articulacion tiene un llamado GRADO DE LIBERTAD, que es la independencia que tiene cada articulacion.
Transmisiones y reductores
Transmisiones
Elementos encargados de transmitir el movimiento desde los actuadores hasta las articulaciones
Se procura que los actuadores más pesados esten lo mas cerca posible a la base del robot.
Accionamiento directo
El eje del actuador se conecta directamente a la carga o articulacion, sin un reductor intermedio.
Aumento en posibilidades de controlabilidad del sistema
Posicionamiento rapido y preciso.
Reductores
De bajo peso, reducido tamaño
Existen modelos especificos para robots.
Existen los CYCLO, HDUC y REDEX-ACBAR
Actuadores
Actuadores neumaticos
Fuente de energia es el aire a presion entre 5 y 10 bar.
No tienen buena presicion.
Cilindros neumaticos y motores neumaticos.
Actuadores hidraulicos
En lugar de aire, usan aceites minerales a presion entre los 50 y 100 bar.
Soporta cargas, peso o presion.
Mayor presicion que los actuadores neumaticos
Actuadores electricos
Motores de corriente continua.
Motores paso a paso.
Motores de corriente alterna.
Sensores internos
Sensores de posicion
Encoders y resolvers.
Sensores lineales de posicion
Sensores de velocidad
Necesarios para mejorar el comportamiento dinamico de los actuadores del robot.
Sensores de presencia
Detecta la presencia de un objeto dentro de un determinado radio de accion
Se usan en robotica como auxiliares de los detectores de posicion.
Elementos terminales
Encargados de interactuar directamente con el entorno del robot
Manipulacion de objetos complicados y delicados