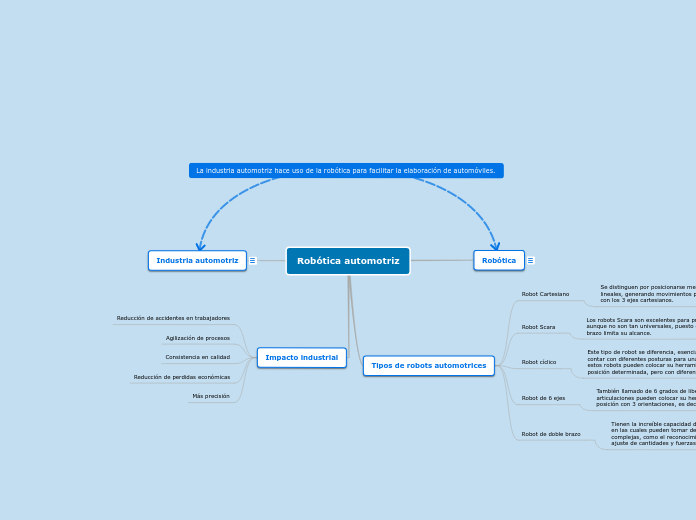
Robótica automotriz
Robótica
Tipos de robots automotrices
Robot Cartesiano
Se distinguen por posicionarse mediante 3 articulaciones lineales, generando movimientos perpendiculares de acuerdo con los 3 ejes cartesianos.
Robot Scara
Los robots Scara son excelentes para procesos de ensamblaje, aunque no son tan universales, puesto que la terminación del brazo limita su alcance.
Robot cíclico
Este tipo de robot se diferencia, esencialmente, por poder contar con diferentes posturas para una sola posición. Es decir, estos robots pueden colocar su herramienta o pinza en una posición determinada, pero con diferentes posturas.
Robot de 6 ejes
También llamado de 6 grados de libertad; pues sus articulaciones pueden colocar su herramienta o pinza en una posición con 3 orientaciones, es decir, con 3 movimientos.
Robot de doble brazo
Tienen la increíble capacidad de ejecutar tareas autónomas, en las cuales pueden tomar decisiones y actividades tan complejas, como el reconocimiento de formas y objetos, o el ajuste de cantidades y fuerzas.
Industria automotriz
Impacto industrial
Reducción de accidentes en trabajadores
Agilización de procesos
Consistencia en calidad
Reducción de perdidas económicas
Más precisión