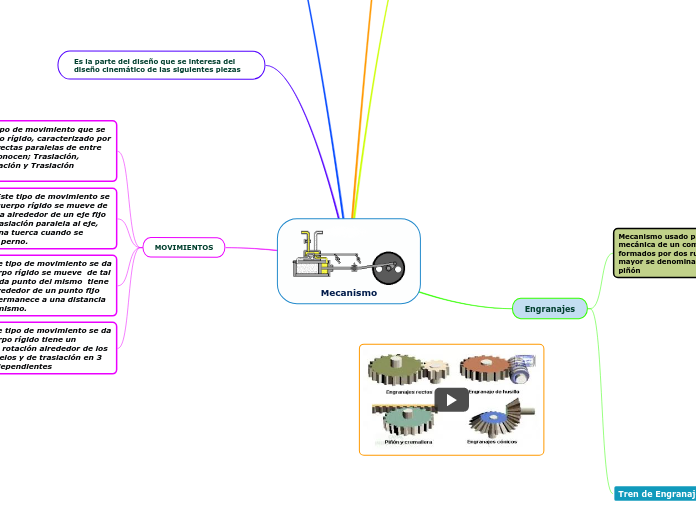

Mecanismo
Eslabones
Se refiere al mecanismo formado por eslabones tales como: manivelas, bielas y palancas,unidos mediantepares ya sean giratorios o deslizantes
Simbologia
Aplicacion
Levas
Elemento mecánico que permite la transformación de un movimiento circular a un movimientorectilíneo mediante el contacto directo a unseguidor Es un mecanismo formado por tres barras móviles y una cuarta barra fija, unidas mediante nudos articulados. Las barras móviles están
unidas a la fija mediante pivotes
TIPOS DE LEVAS: Levas radiales Leva de placa o de disco. Leva de cuña.
Levas axiales. Leva cilíndrica nervada. Leva cilíndrica ranurada. Leva cilíndrica de cara.
Subtopic
APLICACION
Sistemas de distribución
Bombas de Inyección
Cardanes,-cardanes y reductor,-ejes vinculados por poleas-correas
Ejes vinculados por cadenas/piñones
Levas mecánicas
Subtopic
Arbol de leva Es el encargado de producir la apertura y cierre de las válvulas de admisión y escape. Dicho árbol recibe el giro del cigüeñal y lo transmite (por medio del perfil de sus levas) a las válvulas. En los motores de cuatro tiempos el árbol de levas da una vuelta completa por cada dos del cigüeñal.
Engranajes
Mecanismo usado para pasar potencia mecánica de un componente a otro. Están formados por dos ruedas dentadas, la mayor se denomina corona y la menor piñón
Tipos De Engranajes
Ejes Perdiculares • Helicoidales cruzados
• Cónicos de dientes rectos
• Cónicos de dientes helicoidales
• Cónicos hioides
• De rueda y tornillo sinfín
Ejes Paralelos • cilindros de dientes rectos
• Cilindros de dientes helicoidales
• Doble helicoidales
Tipos de Engranaje
Aplicacion
Existen, además cuatro aplicaciones de los engranajes .Bomba hidráulica. Transforma la energía .mecánica rotatoria en energía hidráulica.
.Reductor de velocidad.
.Diferencial.
.Caja de velocidades.
Subtopic
Tren de Engranajes
Se hace con varias ruedas dentadas dobles unidas en cadena, de modo que en cada rueda doble una hace de conducida de la anterior y otra de conductora de la siguiente.
Topic principal
Es la parte del diseño que se interesa del diseño cinemático de las siguientes piezas
MOVIMIENTOS
PLANO: Es el tipo de movimiento que se da en un cuerpo rígido, caracterizado por utilizar líneas rectas paralelas de entre los cuales se conocen; Traslación, Rectilínea, Rotación y Traslación Curvilínea
HELICOIDAL: Este tipo de movimiento se da cuando un cuerpo rígido se mueve de manera rotativa alrededor de un eje fijo y a la vez en traslación paralela al eje, por ejemplo; una tuerca cuando se atornilla en un perno.
ESFERICO: Este tipo de movimiento se da cuando un cuerpo rígido se mueve de tal manera que cada punto del mismo tiene movimiento alrededor de un punto fijo en tanto que permanece a una distancia constante del mismo.
ESPACIAL: Este tipo de movimiento se da cuando un cuerpo rígido tiene un movimiento de rotación alrededor de los 3 ejes no paralelos y de traslación en 3 direcciones independientes