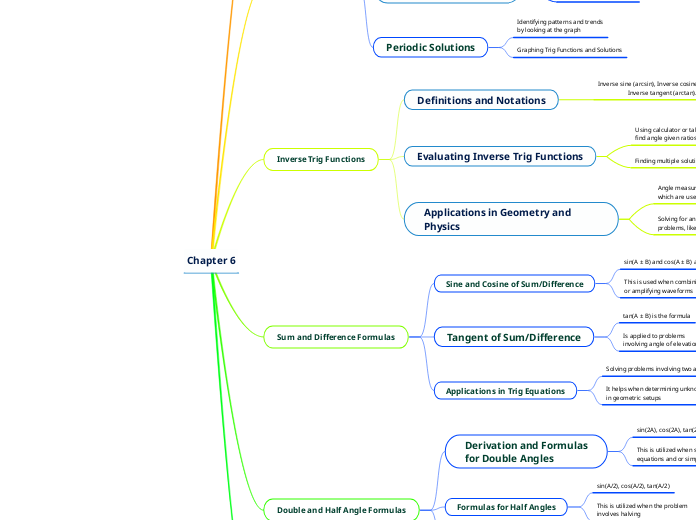
Chapter 6
Trig Identities
Fundamental Identites
Pythagorean Identity: sin²(θ) + cos²(θ) = 1
Reciprocal Identities: csc(θ) = 1/sin(θ), sec(θ) = 1/cos(θ), cot(θ) = 1/tan(θ)
Quotient Identities: tan(θ) = sin(θ)/cos(θ), cot(θ) = cos(θ)/sin(θ)
Trig Equations
Solving Basic Trig Equations
You must isolate the trig function
by itself in order to solve the problem.
Solving basic trigonometry equations
helps identify periodic solutions
Multiple Solutions
and General Solutions
Trig functions are periodic
and have multiple solutions
General solutions are also
found using parameter "n"
Periodic Solutions
Identifying patterns and trends
by looking at the graph
Graphing Trig Functions and Solutions
Inverse Trig Functions
Definitions and Notations
Inverse sine (arcsin), Inverse cosine (arccos),
Inverse tangent (arctan).
Evaluating Inverse Trig Functions
Using calculator or tables to
find angle given ratios
Finding multiple solutions.
Applications in Geometry and Physics
Angle measures in right triangles
which are used later in the course.
Solving for angles in real world
problems, like inclined planes
Sum and Difference Formulas
Sine and Cosine of Sum/Difference
sin(A ± B) and cos(A ± B) are the formulas
This is used when combining
or amplifying waveforms
Tangent of Sum/Difference
tan(A ± B) is the formula
Is applied to problems
involving angle of elevation
Applications in Trig Equations
Solving problems involving two angles
It helps when determining unknown angles
in geometric setups
Double and Half Angle Formulas
Derivation and Formulas
for Double Angles
sin(2A), cos(2A), tan(2A)
This is utilized when solving trig
equations and or simplifying
Formulas for Half Angles
sin(A/2), cos(A/2), tan(A/2)
This is utilized when the problem
involves halving
Applications in Trig
Equations and Calculations
Calculating and unknowns in scenarios
with reduced angles
Simplifying trig expressions in
calculus problems
Sum to Product and Product to Sum
Sum to Product Formulas
sin(A) + sin(B) or cos(A) + cos(B)
2 * sin((A + B) / 2) * cos((A - B) / 2)
Applications
Simplifying integrals and trig expressions
Calculating areas in polar coordinates
Converting trigonometric equations for easier solving
Product to Sum Formulas
sin(A) * sin(B) or cos(A) * cos(B)
1/2 * [cos(A - B) - cos(A + B)]
Chapter 7
Right Triangle Trig
Right Triangles
One angle is exactly 90 degrees
The side opposite the right angle is the hypotenuse, while the other two sides are the legs
Trigonometric Ratios in Right Triangles
Sine Ratio (sinθ) = Opposite / Hypotenuse
Cosine Ratio (cosθ) = Adjacent / Hypotenuse
Tangent Ratio (tanθ) = Opposite / Adjacent
Special Right Triangles
45-45-90 triangle: Legs are congruent, angles are 45 degrees each
30-60-90 triangle: One angle is 30 degrees, the other is 60 degrees
Real-world Applications
Navigation, such as determining distances from elevation changes
Engineering for designing structures and systems
Law of Sines
Law of Sines Intro
Typically useful when solving triangles that aren't
right triangles
sin(A) / a = sin(B) / b = sin(C) / c
Ratio of a side's length to the sine of the opposite angle is constant for all sides and angles
Solving
Given two sides and a non-included angle, use the Law of Sines to find the missing parts
Ambiguous Case: When given two sides and an angle opposite one of them, there might be multiple solutions
Ambiguous Case (SSA)
When given two sides and a non-included angle, there can be two, one, or no possible triangles
Real-world Applications
Astronomy for calculating distances to celestial bodies
Law of Cosines
Formulas
a² = b² + c² - 2bc * cos(A)
b² = a² + c² - 2ac * cos(B)
c² = a² + b² - 2ab * cos(C)
Ambiguous Case (SSS)
Occurs when the side lengths form a triangle that can be "folded" to create two different triangles
When given all three sides, multiple triangles might satisfy the given conditions
Real-world Applications
Calculating distances between points on Earth's surface
Designing structures, determining forces and tensions in bridges
Projectile motion and collision analysis
Area of a Triangle
Real-world Applications
Geometry and construction for calculating surface areas
Surveying and cartography for determining land areas
Using Trigonometry for Area
If two sides and the angle between them are known, the area can be calculated using trigonometric ratios
Area = 0.5 * a * b * sin(C)
Helpful when angles and two sides are provided
Polar Coordinates
Introduction
Cartesian coordinates (x, y) represent points in a plane using horizontal and vertical distances
Polar coordinates (r, θ) represent points using distance from the origin (r) and angle (θ) from the positive x-axis
x = r * cos(θ), y = r * sin(θ)
Limitations
Not suitable for every situation, particularly when Cartesian coordinates are more intuitive
Take care with negative angles and ambiguous notation
Problem Solving
Solving problems involving circular or radial symmetry
Calculating areas and distances using polar coordinates
Analyzing curves with rotational symmetry
Polar Equations and Graphs
Introduction
Polar equations express relationships between the distance (r) from the origin and the angle (θ) from the positive x-axis
They allow us to describe complex shapes and patterns not easily represented in Cartesian coordinates
Common Polar Equations
Circle: r = a, where 'a' is the radius
Cardioid: r = a + b * cos(θ) or r = a + b * sin(θ), forming heart-like shapes
Lemniscate: r² = a² * cos(2θ), creating an infinity symbol
Spiral: r = a * θ or r = a * e^(bθ), resulting in spiraling patterns
Graphing Polar Equations
Plotting points by calculating r for various θ values
Identifying symmetrical patterns and repeating loops
Limaçons
Polar equations of the form r = a ± b * cos(θ)
Shape depends on the values of 'a' and 'b', creating loops and cusps
Chapter 8
Parametric Equations
Introduction
Parametric equations are a way to express the coordinates of a point in terms of one or more parameters
Instead of the usual x and y coordinates, you have equations for x and y separately in terms of a parameter, often denoted as 't'
Parametric equations often involve trigonometric functions
Converting to Cartesian Form
You can convert parametric equations to Cartesian form by eliminating the parameter 't'
Solve one equation for 't' and substitute into the other equation
Vectors
Introduction
Vectors are mathematical quantities that have both magnitude and direction
They are used to represent various physical quantities like displacement, force, and velocity
Vectors are often represented as arrows pointing in a certain direction with a specific length
Vectors can be represented using trigonometric notation (magnitude and direction) or Cartesian notation (components)
Trigonometry is used to calculate angles and magnitudes in vector calculations
Adding and Subtracting Vectors
Vectors can be added geometrically by placing them head to tail
The result is the vector that connects the starting point of the first vector to the endpoint of the last vector
Scalar Multiplication of Vectors
Scalar multiplication changes the magnitude of a vector but not its direction
Multiplying a vector A by scalar 'c' results in a new vector with magnitude |c| * |A| and the same direction if 'c' is positive
Dot Product
Introduction
The dot product (also known as the scalar product) is an operation that combines two vectors to produce a scalar (a single number)
It measures the "projection" of one vector onto another, taking into account their magnitudes and the angle between them
Calculating
A · B = Ax * Bx + Ay * By
A · B = |A| * |B| * cos(θ), where θ is the angle between A and B
Properties
The dot product is commutative: A · B = B · A
If the dot product is zero (A · B = 0), the vectors are orthogonal (perpendicular)
A · B is positive if the angle between A and B is acute, negative if it's obtuse
Cross Product
Introduction
The cross product (also known as the vector product) is an operation that combines two vectors to produce a new vector
Unlike the dot product, the cross product results in a vector that is perpendicular to the plane containing the original vectors
For two vectors A = (Ax, Ay, Az) and B = (Bx, By, Bz), the cross product is given by
A × B = (Ay * Bz - Az * By, Az * Bx - Ax * Bz, Ax * By - Ay * Bx)
Properties
The cross product is anticommutative: A × B = - (B × A)
The magnitude of the cross product is |A| * |B| * sin(θ), where θ is the angle between A and B
The direction of the resulting vector follows the right-hand rule: Point your fingers in the direction of A, curl them towards B, and your thumb points in the direction of A × B
Trig
The cross product formula uses the sine of the angle between vectors
Trigonometry is needed for calculating the cross product when only the magnitudes and the angle are known