
Компьютерное зрение
Определение
Компьютерное зрение (иначе техническое зрение) — теория и технология создания машин, которые могут производить обнаружение, отслеживание и классификацию объектов.Как научная дисциплина, компьютерное зрение относится к теории и технологии создания искусственных систем, которые получают информацию из изображений. Видеоданные могут быть представлены множеством форм, таких как видеопоследовательность, изображения с различных камер или трехмерными данными, например с устройства Kinect или медицинского сканера
Связанные области

Обработка изображений
Обработка изображений или анализ изображений, в основном сосредоточены на работе с двухмерными изображениями, то есть как преобразовать одно изображение в другое. Например, попиксельные операции увеличения контрастности, операции по выделению краёв, устранению шумов или геометрические преобразования, такие как Аффинные преобразования. Данные операции предполагают, что обработка/анализ изображения действуют независимо от содержания самих изображений.Компьютерное зрение сосредотачивается на обработке трехмерных сцен, спроектированных на одно или несколько изображений. Например, восстановлением структуры или другой информации о трехмерной сцене по одному или нескольким изображениям. Компьютерное зрение часто зависит от более или менее сложных допущений относительно того, что представлено на изображениях.
Машинное зрение
Машинное зрение сосредотачивается на применении, в основном промышленном, например, автономные роботы и системы визуальной проверки и измерений. Это значит, что технологии датчиков изображения и теории управления связаны с обработкой видеоданных для управления роботом и обработка данных в реальном времени осуществляется аппаратно или программно

Визуализация
Визуализация первоначально была связана с процессом создания изображений, но иногда имела дело с обработкой и анализом. Например, рентгенография работает с анализом видеоданных медицинского применения.
Распознавание образов
Распознавание образов является областью, которая использует различные методы для получения информации из видеоданных, в основном, основанные на статистическом подходе. Значительная часть этой области посвящена практическому применению этих методов.
Типичные задачи

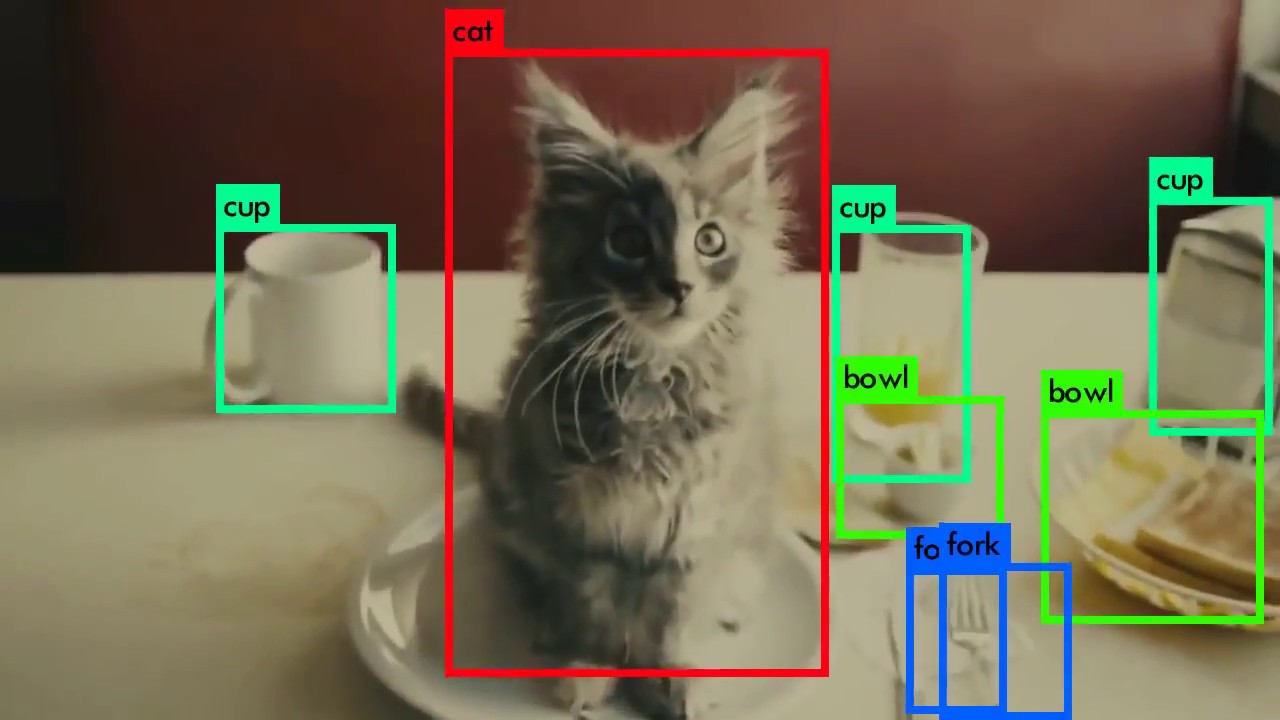
Роспознавание
Классическая задача в компьютерном зрении, обработке изображений и машинном зрении это определение содержат ли видеоданные некоторый характерный объект, особенность или активность. Эта задача может быть достоверно и легко решена человеком, но до сих пор не решена удовлетворительно в компьютерном зрении в общем случае: случайные объекты в случайных ситуациях.Существующие методы решения этой задачи эффективны только для отдельных объектов, таких как простые геометрические объекты (например, многогранники), человеческие лица, печатные или рукописные символы, автомобили и только в определённых условиях, обычно это определённое освещение, фон и положение объекта относительно камеры.В литературе описано различное множество проблем распознавания:Распознавание: один или несколько предварительно заданных или изученных объектов или классов объектов могут быть распознаны, обычно вместе с их двухмерным положением на изображении или трехмерным положением в сцене.Идентификация: распознается индивидуальный экземпляр объекта. Примеры: идентификация определённого человеческого лица или отпечатка пальцев или автомобиля.Обнаружение: видеоданные проверяются на наличие определённого условия. Например, обнаружение возможных неправильных клеток или тканей в медицинских изображениях. Обнаружение, основанное на относительно простых и быстрых вычислениях иногда используется для нахождения небольших участков в анализируемом изображении, которые затем анализируются с помощью приемов, более требовательных к ресурсам, для получения правильной интерпретации.Существует несколько специализированных задач, основанных на распознавании, например:Поиск изображений по содержанию: нахождение всех изображений в большом наборе изображений, которые имеют определённое содержание. Содержание может быть определено различными путями, например в терминах схожести с конкретным изображением (найдите мне все изображения похожие на данное изображение), или в терминах высокоуровневых критериев поиска, вводимых как текстовые данные (найдите мне все изображения, на которых изображено много домов, которые сделаны зимой и на которых нет машин).Оценка положения: определение положения или ориентации определённого объекта относительно камеры. Примером применения этой техники может быть содействие руке робота в извлечении объектов с ленты конвейера на линии сборки.Оптическое распознавание знаков: распознавание символов на изображениях печатного или рукописного текста, обычно для перевода в текстовый формат, наиболее удобный для редактирования или индексации (например, ASCII).

Движение
Несколько задач, связанных с оценкой движения, в которых последовательность изображений (видеоданные) обрабатываются для нахождения оценки скорости каждой точки изображения или 3D сцены. Примерами таких задач являются:Определение трехмерного движения камерыСлежение, то есть следование за перемещениями объекта (например, машин или людей)
Восстановление сцены
Даны два или больше изображения сцены, или видеоданные. Восстановление сцены имеет задачей воссоздать трехмерную модель сцены. В простейшем случае, моделью может быть набор точек трехмерного пространства. Более сложные методы воспроизводят полную трехмерную модель.
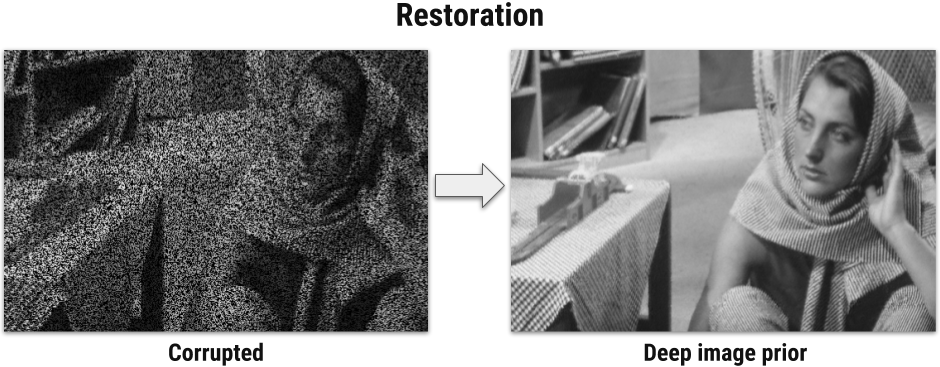
Восстановление изображений
Задача восстановления изображений это удаление шума (шум датчика, размытость движущегося объекта и т. д.). Наиболее простым подходом к решению этой задачи являются различные типы фильтров, таких как фильтры нижних или средних частот. Более сложные методы используют представления того, как должны выглядеть те или иные участки изображения, и на основе этого их изменение.Более высокий уровень удаления шумов достигается в ходе первоначального анализа видеоданных на наличие различных структур, таких как линии или границы, а затем управления процессом фильтрации на основе этих данных.
Работу выполнила
Попова Ксения,
студентка фар-с-о-19-1
Примеры
Системы управления процессами (промышленные роботы, автономные транспортные средства).Системы видеонаблюдения.Системы организации информации (например, для индексации баз данных изображений).Системы моделирования объектов или окружающей среды (анализ медицинских изображений, топографическое моделирование).Системы взаимодействия (например, устройства ввода для системы человеко-машинного взаимодействия).Системы дополненной реальности.Вычислительная фотография, например, для мобильных устройств с камерами.
Примеры применения

Медицина
Одним из наиболее важных применений является обработка изображений в медицине. Эта область характеризуется получением информации из видеоданных для постановки медицинского диагноза пациентам. В большинстве случаев, видеоданные получают с помощью микроскопии, рентгенографии, ангиографии, ультразвуковых исследований и томографии. Примером информации, которая может быть получена из таких видеоданных является обнаружение опухолей, атеросклероза или других злокачественных изменений. Также примером может быть измерение размеров органов, кровотока и т. д. Эта прикладная область также способствует медицинским исследованиям, предоставляя новую информацию, например, о строении мозга или качеству медицинского лечения.

Промышленность
Другой прикладной областью компьютерного зрения является промышленность. Здесь информацию получают для целей поддержки производственного процесса. Примером может служить контроль качества, когда детали или конечный продукт автоматически проверяются на наличие дефектов. Другим примером является измерение положения и ориентации деталей, поднимаемых рукой робота.

Военное дело
Военное применение является, пожалуй самой большой областью компьютерного зрения. Очевидными примерами являются обнаружение вражеских солдат и транспортных средств и управление ракетами. Наиболее совершенные системы управления ракетами посылают ракету в заданную область, вместо конкретной цели, а селекция целей производится, когда ракета достигает заданной области, основываясь на получаемых видеоданных. Современное военное понятие, такое как «боевая осведомленность», подразумевает, что различные датчики, включая датчики изображения, предоставляют большой набор информации о поле боя, которая может быть использована для принятия стратегических решений. В этом случае, автоматическая обработка данных используется, чтобы уменьшить сложность или увеличить надежность получаемой информации.

Транспортные средства
Одними из новых областей применения являются автономные транспортные средства, включая подводные, наземные (роботы, машины), воздушные. Уровень автономности изменяется от полностью автономных (беспилотных) до транспортных средств, где системы, основанные на компьютерном зрении, поддерживают водителя или пилота в различных ситуациях. Полностью автономные транспортные средства используют компьютерное зрение для навигации, то есть для получения информации о месте своего нахождения, для создания карты окружающей обстановки, для обнаружения препятствий. Они также могут быть использованы для определённых задач, например, для обнаружения лесных пожаров. Примерами таких систем могут быть система предупредительной сигнализации о препятствиях на машинах и системы автономной посадки самолетов. Некоторые производители машин демонстрировали системы автономного управления автомобилем, но эта технология все ещё не достигла того уровня, когда её можно запустить в массовое производство.
Другие области
Сюда относят:Поддержку создания видеоэффектов для кино и телевиденияНаблюдение
Системы
Получение изображений
Цифровые изображения получаются от одного или нескольких датчиков изображения, которые помимо различных типов светочувствительных камер включают датчики расстояния, радары, ультразвуковые камеры и т. д. В зависимости от типа датчика, получающиеся данные могут быть обычным 2D изображением, 3D изображением или последовательностью изображений. Значения пикселей обычно соответствуют интенсивности света в одной или нескольких спектральных полосах (цветные или изображения в оттенках серого), но могут быть связаны с различными физическими измерениями, такими как глубина, поглощение или отражение звуковых или электромагнитных волн, или ядерным магнитным резонансом.
Предварительное обработка
Перед тем, как методы компьютерного зрения могут быть применены к видеоданным с тем, чтобы извлечь определённую долю информации, необходимо обработать видеоданные, с тем чтобы они удовлетворяли некоторым условиям, в зависимости от используемого метода. Примерами являются:Повторная выборка с тем, чтобы убедиться, что координатная система изображения вернаУдаление шума с тем, чтобы удалить искажения, вносимые датчикомУлучшение контрастности, для того, чтобы нужная информация могла быть обнаруженаМасштабирование для лучшего различения структур на изображении
Выделение деталей
Детали изображения различного уровня сложности выделяются из видеоданных. Типичными примерами таких деталей являются:Линии, границы и кромкиЛокализованные точки интереса, такие как углы, капли или точки: более сложные детали могут относиться к структуре, форме или движению.

Детектирование/сегментация
На определённом этапе обработки принимается решение о том, какие точки или участки изображения являются важными для дальнейшей обработки. Примерами являются:Выделение определённого набора интересующих точекСегментация одного или нескольких участков изображения, которые содержат характерный объект
Высокоуровневая обработка
На этом шаге входные данные обычно представляют небольшой набор данных, например набор точек или участок изображения, в котором предположительно находится определённый объект. Примерами являются:Проверка того, что данные удовлетворяют условиям, зависящим от метода и примененияОценка характерных параметров, таких как положение или размер объектаКлассификация обнаруженного объекта по различным категориям