MANUAL DE PROGRAMACIÓN ARDUINO
Entorno de desarrollo
Para programar la placa es necesario descargarse de la página web de Arduino el entorno de desarrollo (IDE). Se dispone de versiones para Windows y para MAC, así como las fuentes para compilarlas en LINUX. En la Figura 2 se muestra el aspecto del entorno de programación. En el caso de disponer de una placa USB es necesario instalar los drivers FTDI. Estos drivers vienen incluidos en el paquete de Arduino mencionado anteriormente. Existen en la web versiones para distintos sistemas operativos.
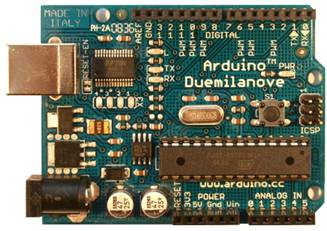
Características generales de la placa
Se trata de una placa open hardware por lo que su diseño es de libre distribución y utilización, que incluso podemos construirnos nosotros mismos
Ejemplos de código
Salida digital En este ejemplo el LED conectado al pin 13 parpadea cada segundo. int ledPin = 13; // LED que se encuentra en el pin 13 void setup(){ pinMode(ledPin, OUTPUT); // El p1n 13 será una salida digital } void loop(){ digitalWrite(ledPin, HIGH); // Enciende el LED delay(1000); // Pausa de 1 segundo digitalWrite(ledPin, LOW); // Apaga el LED delay(1000); // Pausa de 1 segundo } Salida digital IIEn este ejemplo el LED conectado al pin 13 parpadea en un intervalo de tiempo variable que depende del número de veces que se ejecuta el programa (función loop) int ledPin = 13; // LED que se encuentra en el pin 13int n = 0; //Entero que contará el paso por la función loopvoid setup(){ pinMode(ledPin, OUTPUT); // El p1n 13 será una salida digital } void loop(){ digitalWrite(ledPin, HIGH); // Enciende el LED delay(1000); // Pausa de 1 segundo digitalWrite(ledPin, LOW); // Apaga el LED n++; //Incrementamos n delay(delayVal(n)); //Pausa de un tiempo variable} //Función que devuelve un valor tipo entero según el parámetro pasado int delayVal(int f){ return f*100;} Entrada digital Este ejemplo lee el valor de un interruptor conectado en el pin 2. Cuando el interruptor está cerrado en el pin de entrada habrá un estado alto (HIGH) y se encenderá el LED. int ledPin = 13; // Pin de salida para el LED int inPin = 2; // Pin de entrada (donde está conectado el interruptor) void setup() { pinMode(ledPin, OUTPUT); pinMode(inPin, INPUT); } void loop() { if (digitalRead(inPin) == HIGH){ // Si se activa interruptor digitalWrite(ledPin, HIGH); // Enciende el LED delay(1000); // Pause de 1 segundo digitalWrite(ledPin, LOW); // Apaga el LED delay(1000); // Pausa de 1 segundo } } Salida PWM Modulación por ancho de pulso (PWM) puede emplearse, por ejemplo, para establecer el brillo de un led o controlar un servomotor. En el siguiente ejemplo se va aumentando y decrementando el brillo del pin 9 mediante PWM. int ledPin = 9; // Pin controlado por PWM void setup(){} void loop() { for (int i=0; i<=255; i++){ analogWrite(ledPin, i); // Establece el brillo a i delay(100); // Pausa de 100 ms } for (int i=255; i>=0; i--) { analogWrite(ledPin, i); delay(100); } } Entrada a partir de un potenciómetro En el siguiente código se emplea arduino para controlar la frecuencia de parpadeo de un LED. int potPin = 0; // Pin de entrada para el potenciómetro int ledPin = 13; // Pin de salida para el LEDvoid setup() { pinMode(ledPin, OUTPUT); // Declara el pin del LED como de salida} void loop() { digitalWrite(ledPin, HIGH); // Enciende el LED delay(analogRead(potPin)); // Lee el valor del potenciómetro digitalWrite(ledPin, LOW); // Apaga el LED delay(analogRead(potPin)); }
Puerto serie
Serial.begin(rate). Abre un Puerto serie y especifica la velocidad de transmisión. La velocidad típica para comunicación con el ordenador es de 9600 aunque se pueden soportar otras velocidades.Serial.println(data). Imprime datos al puerto serie seguido por un retorno de línea automático. Este comando tiene la misma forma que Serial.print() pero este último sin el salto de línea al final. Este comando puede emplearse para realizar la depuración de programas. Para ello puede mandarse mensajes de depuración y valores de variables por el puerto serie. Posteriormente, desde el entorno de programación de Arduino, activando el "Serial Monitor" se puede observar el contenido del puerto serie, y, por lo tanto, los mensajes de depuración. Para observar correctamente el contenido del puerto serie se debe tener en cuenta que el "Serial Monitor" y el puerto serie han de estar configurados a la misma velocidad (Para configurar la velocidad del puerto serie se hará con el comando Serial.begin(rate)).Serial.read().Lee o captura un byte (un caracter) desde el puerto serie. Devuelve -1 si no hay ningún carácter en el puerto serie.Serial.available(). Devuelve el número de caracteres disponibles para leer desde el puerto serie.
Funciones de generación aleatoria
randomSeed(seed). Especifica un valor o semilla como el punto de inicio para la función random(). Este parámetro debe ser realmente aleatorio y para ello puede emplearse la función millis() o incluso analogRead() para leer ruido eléctrico desde una entrada analógica.random(max), random(min, max). Esta función devuelve un valor aleatorio entre el rango especificado.
Funciones de tiempo y matemáticas
delay(ms). Realiza una pausa en el programa la cantidad de tiempo en milisegundos especificada en el parámetro (máximo 1000, mínimo 1).millis(). Devuelve la cantidad de milisegundos que lleva la placa Arduino ejecutando el programa actual como un valor long unsigned. Después de de 9 horas el contador vuelve a 0.min(x,y). max(x,y). Devuelve el mínimo y el máximo respectivamente de entre sus parámetros.
Entradas y salidas digitales y analógicas
Función pinMode(pin, mode)Función usada en la function setup() para configurar un pin dado para comportarse como INPUT o OUTPUT. Ej. pinMode(pin, OUTPUT); configura el pin número 'pin' como de salida. Los pines de Arduino funcionan por defecto como entradas, de forma que no necesitan declararse explícitamente como entradas empleando pinMode(). Función digitalRead(pin)Lee el valor desde un pin digital específico. Devuelve un valor HIGH o LOW. El pin puede ser especificado con una variable o una constante (0-13). Ej. v = digitalRead(Pin); Funcion digitalWrite(pin, value)Introduce un nivel alto (HIGH) o bajo (LOW) en el pin digital especificado. De nuevo, el pin puede ser especificado con una variable o una constante 0-13. Ej. digitalWrite(pin, HIGH); Función analogRead(pin)Lee el valor desde el pin analógico especificado con una resolución de 10 bits. Esta función solo funciona en los pines analógicos (0-5). El valor resultante es un entero de 0 a 1023. Los pines analógicos, a diferencia de los digitales no necesitan declararse previamente como INPUT o OUTPUT.Función analogWrite(pin, value)Escribe un valor pseudo-analógico usando modulación por ancho de pulso (PWM) en un pin de salida marcado como PWM. Esta función está activa para los pines 3, 5, 6, 9, 10, 11. Ej analogWrite(pin, v); // escribe 'v' en el 'pin' analógico. Puede especificarse un valor de 0 - 255. Un valor 0 genera 0 V en el pin especificado y 255 genera 5 V. Para valores de 0 a 255, el pin alterna rápidamente entre 0 V y 5 V, cuanto mayor sea el valor, más a menudo el pin se encuentra en HIGH (5 V). Por ejemplo, un valor de 64 será 0 V tres cuartas partes del tiempo y 5 V una cuarta parte. Un valor de 128 será 0 V la mitad del tiempo y 5 V la otra mitad. Un valor de 192 será 0 V una cuarta parte del tiempo y 5 V tres cuartas partes.
Estructura básica de un programa
La estructura básica de programación de Arduino es bastante simple y divide la ejecución en dos partes: setup y loop. Setup() constituye la preparación del programa y loop() es la ejecución. En la función Setup() se incluye la declaración de variables y se trata de la primera función que se ejecuta en el programa. Esta función se ejecuta una única vez y es empleada para configurar el pinMode (p. ej. si un determinado pin digital es de entrada o salida) e inicializar la comunicación serie. La función loop() incluye el código a ser ejecutado continuamente (leyendo las entradas de la placa, salidas, etc.).
Funciones
Una función es un bloque de código identificado por un nombre y que es ejecutado cuando la función es llamada. La declaración de una función incluye en primer lugar el tipo de datos que devuelve la función (e.j. int si lo que devuelve es un valor entero). Después del tipo de datos se especifica el nombre de la funció<bookmark>OLE_LINK1</bookmark>int delayVal() { int v; // crea una variable temporal 'v' v = analogRead(pot); // lee el valor del potenciómetro v /= 4; // convierte los valores 0-1023 a 0-255 return v; // devuelve el valor final de la variable }
Variables
Una variable debe ser declarada y opcionalmente asignada a un determinado valor. En la declaración de la variable se indica el tipo de datos que almacenará (int, float, long)
Tipos de datos
Arduino permite manejar los siguientes tipos de datos:Byte. Almacena un valor numérico de 8 bits. Tienen un rango de 0-255. Int. Almacena un valor entero de 16 bits con un rango de 32,767 a -32,768. Long. Valor entero almacenado en 32 bits con un rango de 2,147,483,647 a -2,147,483,648. Float. Tipo coma flotante almacenado en 32 bits con un rango de 3.4028235E+38 a -3.4028235E+38. Arrays Se trata de una colección de valores que pueden ser accedidos con un número de índice (el primer valor del índice es 0).
Operadores aritméticos
Empleando variables, valores constantes o componentes de un array pueden realizarse operaciones aritméticas y se puede utilizar el operador cast para conversión de tipos. Ej. int a = (int)3.5; Además pueden hacerse las siguientes asignaciones: x ++. Lo mismo que x = x + 1. x --. Lo mismo que x = x - 1, or decrements x by -1. x += y. Lo mismo que x = x + y, or increments x by +y. x -= y. Lo mismo que x = x - y . x *= y. Lo mismo que x = x * y. x /= y. Lo mismo que x = x / y. Para su utilización en sentencias condicionales u otras funciones Arduino permite utilizar los siguientes operadores de comparación: x == y. x es igual a y. x != y. x no es igual a y. x < y, x > y, x <= y, x >= y. Y los siguientes operadores lógicos: Y lógico: if (x > 0 && x < 5). Cierto si las dos expresiones lo son. O lógico: if (x > 0 || y > 0). Cierto si alguna expresión lo es. NO lógico: if (!x > 0). Cierto si la expresión es falsa. El lenguaje de Arduino presenta las siguientes constantes predefinidas: TRUE / FALSE.HIGH/LOW. Estas constantes definen los niveles de los pines como HIGH o LOW y son empleados cuando se leen o escriben en las entradas o salidas digitales. HIGH se define como el nivel lógico 1 (ON) o 5 V. LOW es el nivel lógico 0, OFF, o 0 V.INPUT/OUTPUT. Constantes empleadas con la función pinMode() para definir el tipo de un pin digital usado como entrada INPUT o salida OUTPUT. Ej. pinMode(13, OUTPUT);
Sentencias condicionales
El lenguaje de arduino permite realizar sentencias condicionales if, if... else, for, while, do... while. Su utilización es similar a las funciones correspondientes en C.