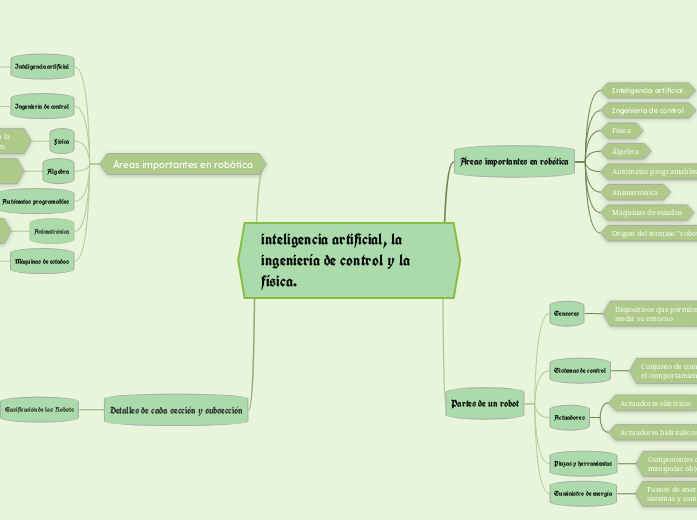
inteligencia artificial, la ingeniería de control y la física.
Áreas importantes en robótica
Inteligencia artificial
Ingeniería de control
Física
Álgebra
Autómatas programables
Animatrónica
Máquinas de estados
Origen del término "robot"
Partes de un robot
Sensores
Dispositivos que permiten a los robots percibir y medir su entorno
como sensores de luz
temperatura
presión
etc
Sistemas de control
Conjunto de componentes y algoritmos que regulan el comportamiento y movimiento de los robots
Actuadores
Actuadores eléctricos
Componentes que convierten energía eléctrica en movimiento
como motores y servomotores
Actuadores hidráulicos y neumáticos
Utilizados para generar movimiento utilizando fluidos
como cilindros hidráulicos y válvulas neumáticas
Pinzas y herramientas
Componentes que permiten a los robots sujetar y manipular objetos
Suministro de energía
Fuente de energía utilizada para alimentar los sistemas y componentes del robot
Áreas importantes en robótica
Inteligencia artificial
Desarrollo de algoritmos y sistemas que permiten a los robots tomar decisiones y adaptarse a su entorno
Ingeniería de control
Diseño y desarrollo de sistemas de control para regular el comportamiento y movimiento de los robots
Física
Estudio de los principios físicos que permiten la construcción y funcionamiento de los robots
Álgebra
Aplicación de conceptos algebraicos en la programación y control de los robots
Autómatas programables
Diseño y programación de sistemas de automatización industrial utilizados en la robótica
Animatrónica
Integración de la electrónica y la mecánica para crear robots con apariencia y movimientos realistas
Máquinas de estados
Modelado y programación de sistemas de control basados en estados y transiciones
Detalles de cada sección y subsección
Clasificación de los Robots
1ª Generación: Robots manipuladores
Sistemas mecánicos multifuncionales con un sencillo sistema de control manual o secuencial
2ª Generación: Robots de aprendizaje
Repiten secuencias de movimientos previamente ejecutadas por un operador humano a través de un dispositivo mecánico
3ª Generación: Robots con control sensorizado
Controlados por un ordenador que ejecuta órdenes de un programa y envía los movimientos necesarios al manipulador o robot