CONTROL Y ROBÓTICA.
SISTEMAS DE CONTROL.
Todos los sistemas automáticos tienen una estructura similar.
El Sensor
Detecta a la presencia de una persona. Es un dispositivo que capta información en forma de magnitudes físicas.
Un Circuito Eléctrico o Controlador
Activa el motor.
Un Mecanismo
Transforma el movimiento rotatorio del motor en movimiento lineal.
La Entrada
Es la información que recibe el sistema.
La salida
Es la respuesta del sistema a esa información
Lazo abierto y cerrado.
Laza Abierto
Son sistemas en los que no se tiene en cuenta el estado de la salida
Lazo cerrado
La salida se compara con la entrada a fin de corregir posibles errores
TIPOS DE SISTEMAS DE CONTROL.
Control electromecánico.
Los sistemas de control electromecánico se basan en la activación de dispositivos por medio del desplazamiento de piezas moviles
Control electrónico.
Los sistemas de control electrónico se basan en el empleo de transistores y de circuitos integrados que operan como controladores
CIRCUITOS BÁSICOS DE CONTROL.
Control de un motor
Basta con permitir o no la circulación de electrones por la base del mismo. De forma similar podríamos controlar otros dispositivos
Control de un relé
Relé activado mediante luz
La LDR deja pasar la corriente cuando incide luz sobre ella
Relé activado mediante oscuridad
La LDR presenta una resistencia muy pequeña cuando incide luz, de forma que no permite que circule apenas corriente por la base del transistor
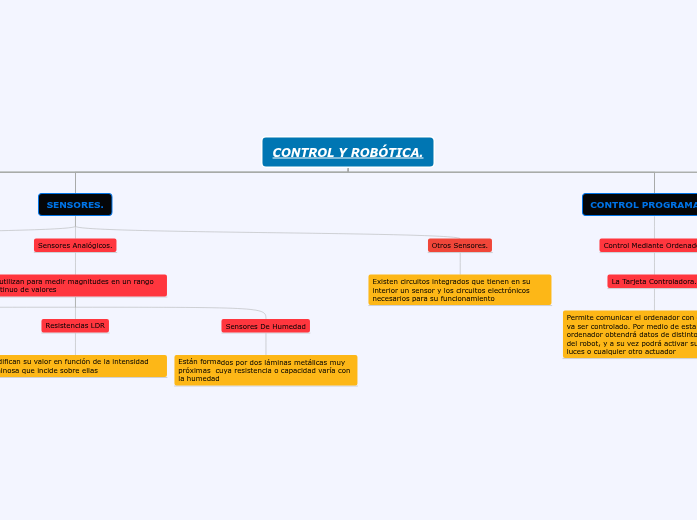
SENSORES.
Sensores Digitales.
Se llaman así porque pueden estar en dos estados. Cuando se activan dejan pasar la corriente eléctrica y desactivados, se comportan como un circuito abierto
Sensores Analógicos.
Se utilizan para medir magnitudes en un rango continuo de valores
Termistores
Se basan en la variación de la resistencia de un semiconductor en función de la temperatura
Resistencias LDR
Modifican su valor en función de la intensidad luminosa que incide sobre ellas
Sensores De Humedad
Están formados por dos láminas metálicas muy próximas cuya resistencia o capacidad varía con la humedad
Otros Sensores.
Existen circuitos integrados que tienen en su interior un sensor y los circuitos electrónicos necesarios para su funcionamiento
CONTROL PROGRAMADO.
Control Mediante Ordenador.
La Tarjeta Controladora.
Permite comunicar el ordenador con el robot que va ser controlado. Por medio de esta tarjeta el ordenador obtendrá datos de distintos sensores del robot, y a su vez podrá activar sus motores, luces o cualquier otro actuador
ROBOTS.
Arquitectura De Un Robot.
El robot necesita recibir información de su entorno mediante Sensores
Podemos clasificar los sensores.
Estado Interno.
Velocidad y fuerzas en cada una de sus articulaciones
Entorno Exterior.
Medidores de temperatura, luz, sonido, dispositivos de control de presencia de otros objetos y medidor de distancias
Los Actuadores.
Reciben como entrada las órdenes desde el controlador y como salida ofrecen movimiento
La Alimentación.
Facilita la energía para el trabajo de todo su sistema robótico(Suele constar de baterías o células fototvoltaicas)
La función del controlador es dirigir el trabajo de los actuadores del robot
Aplicaciones.
Los robots se utilizan en la ejecución de tareas que requieren mucho esfuerzo, o en labores repetitivas. También en trabajos que suponen un riesgo para la vida de las personas
Robots Industriales.
Los robots industriales son los más utilizados, son los brazos robóticos. Las partes que los forman, están unidas entre sí , mediante articulaciones. De acuerdo con su función, el elemento terminal puede ser una garra, un soldador, un taladro, etc
PROGRAMANDO ROBOTS.
Actuadores.
Los actuadores transforman la señal eléctrica de salida en luz, calor , movimiento o sonido
Motores.
Motores Paso A Paso.
Un motor paso a paso es un motor eléctrico que gira un determinado ángulo o paso cada vez que recibe la señal de control
Motores De Corriente Continua.
Giran a gran velocidad. El sentido de giro se controla cambiando la polaridad de los cables que llegan a sus patillas
Servomotores
Los servomotores son motores de corriente continua con un sistema de engranajes, un controlador y un sensor de posición que por lo general es potenciómetro