
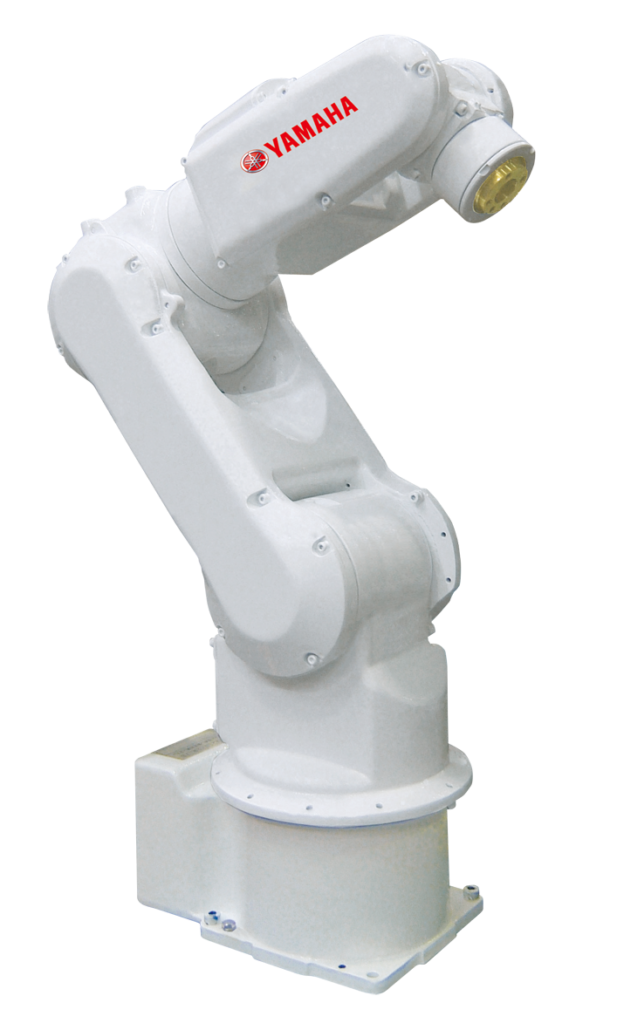
Tipos de robots industriales

También se les denomina como robots de 6 tipos de libertad. ¿Cuál es su cualidad más destacada? Que es muy flexible gracias a las tres orientaciones que tiene su herramienta o pinza. Las tareas de carga y descarga de material suelen automatizarse en las fábricas gracias a los robots de seis ejes.

Robot Scara
La palabra SCARA hace referencia a las siglas Selective Compliant Assembly Robot Arm. Este brazo robótico se utiliza mucho para el pick & place en el sector industrial. Aunque también funciona con el mismo número de ejes que el cartesiano, tiene más grado de libertad que el anterior ya que, además, puede realizar un movimiento de rotación. Al ser muy preciso en movimientos, suele utilizarse para la inserción de componentes en producos.
Micro robots
Los micro robots son pequeños robots móviles diseñados para realizar tareas sencillas, a menudo reemplazando al ser humano en trabajos repetitivos. Estos robots suelen ser controlados por un microcontrolador y pueden variar en tamaño, forma y capacidades
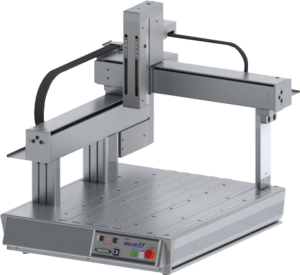
Robot Cartesiano
Se trata de un robot de coordenadas cartesianas. Estos dispositivos funcionan con tres ejes lineales (X, Y y Z), que se mueven en línea recta y forman ángulos rectos. Son robots perfectos para soldar, de ahí a que sea uno de los más utilizados en este sector. Ofrecen precisión, rentabilidad y facilidad en su programación y uso.

Robot ciclico o redumdante

Robot de dos brazos
Tal y como dice su propio nombre, este robot cuenta con dos brazos robóticos que trabajan juntos simultáneamente en una tarea determinada. Debido a las múltiples funciones que realizan y las capacidades con las que cuentan (ajustar la fuerza debida, reconocer objetos o tomar decisiones propias) son robots muy complejos y de elevado coste económico.