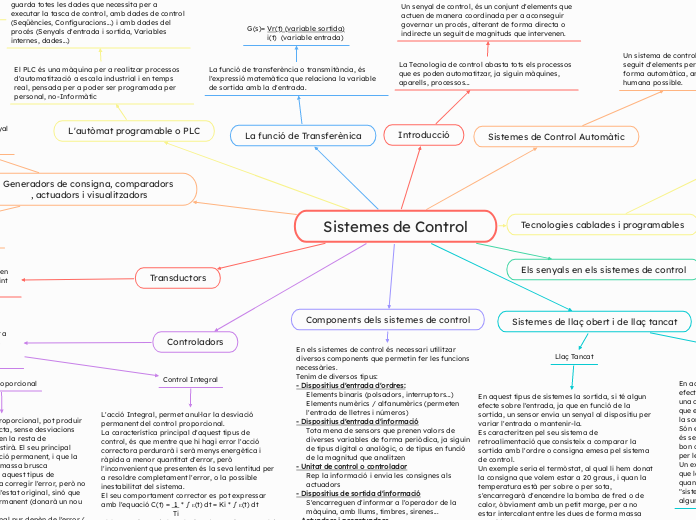
Sistemes de Control
Introducció
La Tecnologia de control abasta tots els processos que es poden automatitzar, ja siguin màquines, aparells, processos...
Un senyal de control, és un conjunt d'elements que actuen de manera coordinada per a aconseguir governar un procés, alterant de forma directa o indirecte un seguit de magnituds que intervenen.
Sistemes de Control Automàtic
Un sistema de control automàtic, format per un seguit d'elements per a realitzar un procés de forma automàtica, amb la mínima intervenció humana possible.
Tecnologies cablades i programables
Tecnologia Cablada
Es la tecnologia de conexió fisica, més emprada avui dia, en circuits pneumatics, elèctrics, etc...
Te alguns inconvenients, com que es poc flexible en cuant a futurs canvis, ocupa molt espai, resulta dificil resoldre avaries, etc, per també te alguns avantatges, com el seu reduit cost.
Tecnologia Programable
La tecnologia problamable, o més coneguda com Bluetooth, te diversos avantatges, sense tenir en compte els desventatges de la tecnologia cablada, com el reduit espasi que ocupa, el reduit manteniment, un menor consum d'energia, permet processar grans quantitats de senyals...
Els senyals en els sistemes de control
Entenem per senyal, la magnitud que utilitzem per a enviar informació de forma contínua. Tenim de 3 tipus:
Sistemes Analògic
Treballa amb sistemes de senyals continus amb un marge de variació determinat. Solen ser utilitzats per a representar magnituds com temperatura, pressió, velocitat...
Sistemes Digitals
Treballa amb senyals "tot o res" (0 o 1), que nomes poden enviar una senyal positiva o negativa, obrir o tancar... Es solen utilitzar per variables lògiques o bits.
Sistemes híbrids
analogicodigitals
Avui dia, són els més utilitzats. Són una mica més complexos que els altres dos tipus, ja que processen els dos tipus de senyals alhora.
Sistemes de llaç obert i de llaç tancat
Llaç Tancat
En aquest tipus de sistemes la sortida, si té algun efecte sobre l'entrada, ja que en funció de la sortida, un sensor envia un senyal al dispositiu per variar l'entrada o mantenir-la.
Es caracteritzen pel seu sistema de retroalimentació que consisteix a comparar la sortida amb l'ordre o consigna emesa pel sistema de control.
Un exemple seria el termòstat, al qual li hem donat la consigna que volem estar a 20 graus, i quan la temperatura està per sobre o per sota, s'encarregarà d'encendre la bomba de fred o de calor, òbviament amb un petit marge, per a no estar intercalant entre les dues de forma massa repetida.
Aquest tipus de sistemes són més complexos i hi intervenen més components.
Els components que intervenen són els mateixos que els de llaç obert, afegint sensors/transductors per a poder realitzar la "retroalimentació" i uns circuits adaptadors anomenats interfícies.
Llaç Obert
En aquest tipus de sistemes la sortida no té cap efecte sobre l'entrada, és a dir que quan es dona una ordre el procés continuarà realitzant-se, fins que es doni l'ordre de parar, independentment de la sortida.
Són econòmics i la seva construcció i manteniment és senzill, els resultats del procés dependran del bon calibratge de la màquina, es veuen afectats per les pertorbacions...
Un exemple, seria l'interruptor de la llum, que farà que la llum estigui encesa independentment de la quantitat de llum o altres variables. L'únic "sistema" que pot tenir és un temporitzador o alguna cosa per l'estil.
Aquest està compost per dues parts, el controlador (encarregat de determinar i executar el procés) i l'actuador o accionador (és l'element que realitza la consigna ordenada pel controlador)
La funció de Transferènica
La funció de transferència o transmitància, és l'expressió matemàtica que relaciona la variable de sortida amb la d'entrada.
G(s)= Vr(t) (variable sortida)
i(t) (variable entrada)
Components dels sistemes de control
En els sistemes de control és necessari utilitzar diversos components que permetin fer les funcions necessàries.
Tenim de diversos tipus:
- Dispositius d'entrada d'ordres:
Elements binaris (polsadors, interruptors...)
Elements numèrics / alfanumèrics (permeten
l'entrada de lletres i números)
- Dispositius d'entrada d'informació
Tota mena de sensors que prenen valors de
diverses variables de forma periòdica, ja siguin
de tipus digital o analògic, o de tipus en funció
de la magnitud que analitzen
- Unitat de control o controlador
Rep la informació i envia les consignes als
actuadors
- Dispositius de sortida d'informació
S'encarreguen d'informar a l'operador de la
màquina, amb llums, timbres, sirenes...
- Actuadors i preactuadors
Són els encarregats de realitzar les consignes,
així com motors, resistències calefactores...
Controladors
El controlador és el dispositiu encarregat d'elaborar el senyal corrector que serà enviat a l'element final amb la finalitat de mantenir les condicions de treball desitjades.
Els diferents tipus de control són:
Control Proporcional
El controlador de tipus proporcional, pot produir una acció correctora exacta, sense desviacions permanents, mentre que en la resta de controladors aquesta existirà. El seu principal inconvenient és la desviació permanent, i que la seva acció correctora és massa brusca
Si les condicions canvien, aquest tipus de controlador actuarà per a corregir l'error, però no és capaç de portar-ho a l'estat original, sinó que produir una desviació permanent (donarà un nou valor "inicial").
El controlador proporcional pur depèn de l'error ( C(t) = Kp * ε(t) )
La seva funció de transferència serà G(t) = Kp, en què Kp és una constant anomenada guany.
L'invers del guany s'anomena banda proporcional i això significa que ε(t) = 1 * C(t) = BP * C(t).
Kp
Control Integral
L'acció Integral, permet anul·lar la desviació permanent del control proporcional.
La característica principal d'aquest tipus de control, és que mentre que hi hagi error l'acció correctora perdurarà i serà menys energètica i ràpida a menor quantitat d'error, però l'inconvenient que presenten és la seva lentitud per a resoldre completament l'error, o la possible inestabilitat del sistema.
El seu comportament corrector es pot expressar amb l'equació C(t) = 1 * ∫ ε(t) dt = Ki * ∫ ε(t) dt
Ti
El factor Ki o 1 és la velocitat de canvi, que també
Ti
es pot expressar com a ΔC(t) = 1 * ε(t)
Δt Ti
Si ε(t) = 0, la vàlvula no es mou, si ε(t) > 0/ <0, la vàlvula s'anirà tancant o obrint fins que l'error sigui nul.
Control derivatiu
Els controladors Integral i Proporcional, no permeten resoldre satisfactòriament els errors pels diferents inconvenients d'aquests tipus de control, i la principal funció d'aquest tipus de control, és precisament complementar els dos tipus de controladors, per a minimitzar els inconvenients dels diferents tipus de control.
L'acció derivativa es pot expressar com
C(t) = Td * dε(t) = Kd * dε(t)
dt dt
Una altra forma d'expressar-la és com
C(t) = Td * Δε(t)
Δt
Control PID
Els controladors PID tenen com a objectiu obtenir els avantatges i superar els inconvenients dels tres tipus de controladors "units" en un sol controlador.
L'acció proporcional s'encarrega de corregir la desviació, de forma ràpida i enèrgica, l'acció integral s'encarrega de corregir l'error a una velocitat proporcional a la quantitat d'error, i l'acció derivativa, corregeix la posició de la vàlvula en funció de la velocitat de canvi de desviació.
El comportament d'un PID es pot expressar amb l'equació: C(t) = Kp {ε(t) + Ki * ∫ ε(t) dt + Kd * dε(t) }
dt
Control Tot o Res
Un control tot o res és el tipus de control que només adopta dos tipus de sortida, 0 o 1.
Les seves equacions són:
ε(t) = E(t) - R(t)
C(t) = 1, si E(t) > R(t)
C(t) = 0, si E(t) < R(t)
A la pràctica aquests tipus de control tenen una "zona morta" en la qual no actuen, amb la qual cosa les equacions que realment representen el seu comportament són:
C(t) = 1, si E(t) > R(t) + h
2
C(t) = 0, si E(t) < R(t) - h
2
Transductors
Els transductors són dispositius que transformen magnituds físiques en una altra magnitud, sovint elèctrica.
Els transductors estan formats per un captador (transforma magnituds en "senyals"), un bloc de tractament de senyal (filtra, preamplifica i tracta el senyal) i una etapa de sortida ( adapten el senyal per als components següents al transductor). Tenim de diferents tipus i els podem classificar en, si són actius o passius (en funció de si necessiten senyal extern = passius, o no = actius), o en funció de la magnitud que mesuren (Posició = Final de cursa, Proximitat = Òptic, etc...
Generadors de consigna, comparadors , actuadors i visualitzadors
El comparador és el dispositiu encarregat de comparar el valor de referència amb el valor de sortida mitjançant el transductor de realimentació, per analitzar si hi ha error o no. El comparador sol formar part de la unitat de control
El generador de consigna és un dispositiu que genera un senyal de referència, per a poder identificar l'error.
Els actuadors són els dispositius que duen a terme les consignes. Alguns exemples són els motors, les bombes hidràuliques, les làmpades... Moltes vegades no les podem accionar des de la unitat de control i requereixen un preactuador per amplificar el senyal, com els reles, contractors...
Els visualitzadors són els elements binaris o numerics/alfanumerics, els quals emeten un senyal de sortida, numeric, luminic, etc per comunicar algun misatge a l'operador de la màquina.
L'autòmat programable o PLC
El PLC és una màquina per a realitzar processos d'automatització a escala industrial i en temps real, pensada per a poder ser programada per personal, no-Informàtic
La memòria d'un PLC, és com el magatzem on guarda totes les dades que necessita per a executar la tasca de control, amb dades de control (Seqüències, Configuracions...) i amb dades del procés (Senyals d'entrada i sortida, Variables internes, dades...)
Tenim diversos tipus de memòries:
- Memòries Volàtils o Ram:
Són les memòries que poden ser llegides,
elaborades i esborrades fàcilment pel propi
autòmat, però quan es desconnecta la màquina,
s'esborra tota la memòria.
- Memòries no Volàtils
ROM = Memòria que només es pot llegir i que es
produïda durant la fabricació de la màquina
PROM = És igual que la ROM, però només es pot
escriure elèctricament un sol cop
EPROM = Es pot escriure elèctricament i esborrar
la memòria més d'un cop, apropant-la a llum
ultraviolada
EEPROM = La programació i l'esborrament de la
memòria es pot realitzar elèctricament diverses
vegades
EAPROM = És similar a la RAM, però quan es
desconnecta la màquina no perd la memòria i
aquesta es pot modificar sense haver d'esborrar
la memòria completament