Mecanismes
Què són els mecanismes?
Es poden definir com dispositius que reben una energia d’entrada i a través d’un
sistema de transmissió i/o transformació del realitzen un treball.
Podem trobar tres tipus diferents de moviments:

Moviment circular o rotatori, com en d’una roda.

Moviment lineal o rectilini, com el de una porta corredera.

Moviment alternatiu, és un moviment d’anada i tornada, un vaivé, com el
del capçal d’una maquina de cosir.
Els mecanismes els podem dividir
en dos grans grups:
Mecanismes de transmissió del moviment – Son aquells en els que es troba el
mateix tipus de moviment a l’entrada com a l’eixida. El que fan estos tipus
de mecanismes és augmentar o disminuir la magnitud del moviment o
variar el sentit d’este.
Mecanismes de transformació del moviment – Son aquells en els que es
transforma el moviment, i per tant, el tipus de moviment a l’entrada del
mecanisme és diferent al que trobem a l’eixida.
1. Mecanismes de transmissió del moviment:Són aquells en els que el moviment que hi ha a l’entrada del mecanisme és el mateix que es troba a l’eixida d’este.
Relació de transmissió (RT)
És la relació existent entre l’entrada (o element motriu) i l’eixida (element conduit)
del mecanisme de transmissió del moviment. Es pot calcular a partir de diferents dades depenent del tipus de mecanisme que es tracte.
Rt=ns/ne
Rt=de/ds
Rt=ze/zs
Tipus de sistemes de mecanismes de transmissió del moviment segons la
Relació de transmissió (RT)
Sistemes Multiplicadors: Són aquells sistemes que tenen una RT > 1.
Sistemes Reductors: Són aquells sistemes que tenen una RT < 1.
Sistemes Mantenidors: Són aquells sistemes que tenen una RT = 1.
Tren d’engranatges
És un sistema format per mes de dos engranatges. Hi ha dos tipus:
Simple: Format per rodes que engranen entre si en el mateix plànol.
Compost: Format per rodes que engranen dos a dos.
Caragol sense fi:En este tipus de mecanisme el caragol sempre actua com a element motriu i la
corona com l’element arrossegat.Este tipus de mecanisme es sol utilitzar com a reductor de moviment.
Caragol sense fi: Peça cilíndrica que disposa d’una o mes ranures o filets
enrotllats de forma helicoïdal.
Corona: Roda dentada amb dents que engranen les ranures del caragol
sense fi.
2. Mecanismes de transformació:Són aquells mecanismes en els que el moviment que hi ha a l’entrada del
mecanisme és distint al que es troba a l’eixida d’este.
Intervenen:
Mecanismes de transformació del moviment circular en rectilini:el pinyó-cremallera,el caragol-femella.
El pinyó-cremallera:mecanisme reversible
Mecanisme constituït per una roda dentada anomenada pinyó i per una
barra dentada denominada cremallera que encaixa amb el pinyó.
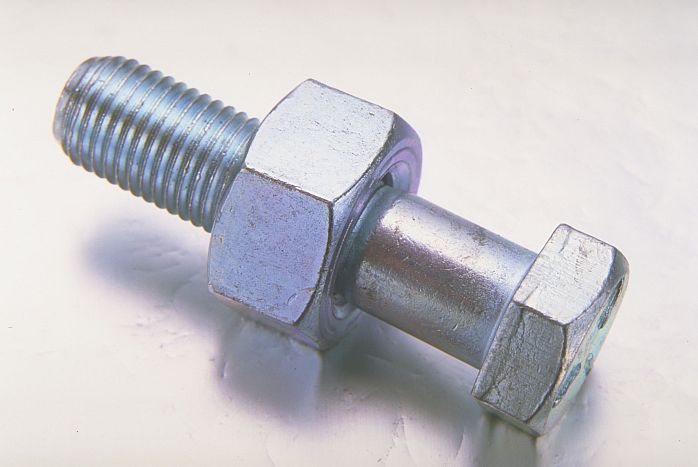
El caragol-femella:mecanisme no reversible
Mecanisme constituït per una vareta roscada anomenada caragol i per
una femella amb un diàmetre interior idèntic al diàmetre del caragol.
Mecanismes de transformació del moviment circular en rectilini alternatiu:biela-manovella i el cigonyal,la lleva,La roda excèntrica.

La biela-manovella:mecanisme reversible
Manovella: És una barra rígida que es troba articulada per un dels
seus extrems amb la biela unida a un eix de gir.
Biela: És una barra rígida que es troba articulada per un dels seus
extrems amb la manovella.
El cigonyal:mecanisme reversible
El cigonyal transforma el moviment circular de l’eix colzat en diferents
moviments rectilinis alternatius descompassats de les diferents bieles.

La lleva-seguidor:mecanisme no reversible
Es tracta d’una roda que té una part que sobreïx i que espenta al seu pas
a una peça anomenada seguidor.

La roda excèntrica-seguidor:mecanisme no reversible
Es tracta d’una roda en el que el seu eix de gir no coincidix amb el centre
de la circumferència.
Què és una màquina?
Es una invenció humana que té per finalitat reduir l’esforç que s’ha de fer.
Exemples:motos, trens, palanques i utinçilis de cuina o de treball.
Màquines simples: Sols necessiten un pas.
Màquines compostes: Necessiten varios passos o treballs encadenats per
a funcionar bé.
1. Les Màquines Simples
Són les màquines mes senzilles que hi ha.

La Politja
La politja o corriola és una roda o disc que té, al llarg de tot el seu contorn,
un solc per on passa una corda.
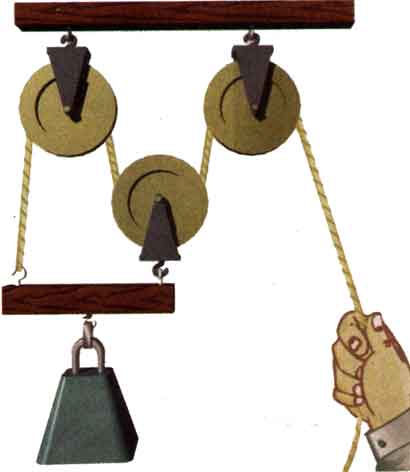
El Polispast
Màquina formada per politges fixes i mòbils.
F=R/2xn
La Palanca
Màquina simple formada per una barra rígida que oscil·la sobre un punt de
suport o fulcre.

El torn
Està format per un cilindre o tambor, l’eix del qual està situat entre dos suports,on
s’enrotlla una corda o cadena i una manovella formada per una barra rígida doblada en dos angles rectes oposats.
Faxda=Frxdr
El caragol
És una peça cilíndrica amb un solc uniforme i continu que descriu una línia
helicoïdal.
El pla inclinat
El pla inclinat és una rampa que servix per a desplaçar objectes des d'un nivell
baix a un altre més elevat.
F=Pxh/L
El tascó o falca
És una màquina simple consistent en una peça prismàtica bé de fusta o bé de
metall, acabada en angle diedre molt agut.