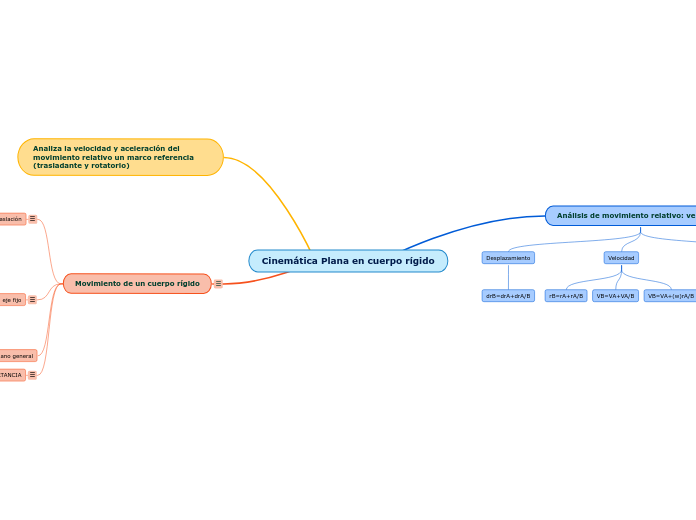
Cinemática Plana en cuerpo rígido
Análisis de movimiento relativo: velocidad
Desplazamiento
drB=drA+drA/B
Velocidad
rB=rA+rA/B
VB=VA+VA/B
VB=VA+(w)rA/B
Aceleración
aB=aA+(aA/B)t+(aA/B)n
Analiza la velocidad y aceleración del movimiento relativo un marco referencia (trasladante y rotatorio)
Movimiento de un cuerpo rígido
Traslación
Posición
rb=ra+rb/a
Velocidad
Va=Vb
Aceleración
aB=aA
Rotación en torno a un eje fijo
Moviemiento angular
Posición Angular "r"
Desplazamiento Angular
Velocidad Angular
Aceleracion Angular
Moviemiento en plano general
Traslacion+ Rotacion
IMPORTANCIA