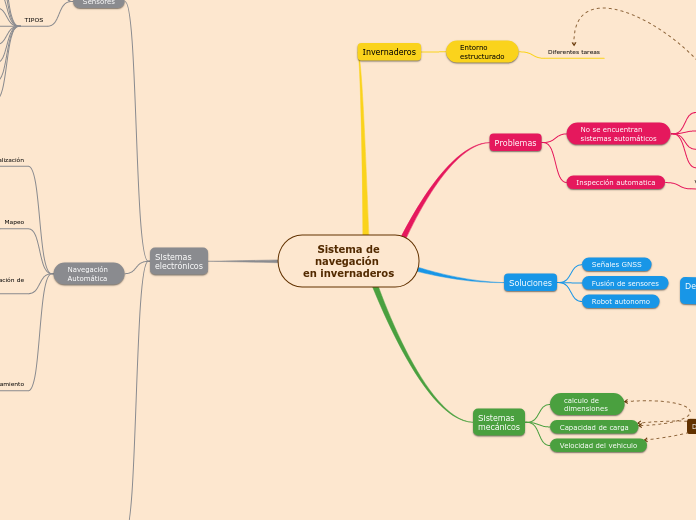
Sistema de
navegación
en invernaderos
Invernaderos
Entorno
estructurado
Diferentes tareas
Problemas
No se encuentran
sistemas automáticos
Limpieza de hojas
Recolección
Detención temprana de plagas
Plataformas roboticas
Inspección automatica
Visión artificial
Soluciones
Señales GNSS
Fusión de sensores
Robot autonomo
Sistemas
mecánicos
calculo de dimensiones
Capacidad de carga
Velocidad del vehiculo
Sistemas
electrónicos
Sensores
Operación
Control
TIPOS
LIDAR
SONAR
Inerciales
Odometría
RADAR
Presion
Ph
Humedad
Temperatura
Navegación
Automática
Localización
Control de
navegación
Problema
Seguimiento
en trayectorias
Algunas
soluciones
Usar un robot
movil virtual
Representación
Posiciones
Velocidades
Mapeo
Observaciones
del entorno
Planificación de
rutas
Determinar la
mejor opción
Tipos
Estrategias
deliberadas
Mapa
Libre de obstaculos
Estrategias
reativas
Control de
trayectorias
Datos suministrados
Sensores
Posicionamiento
GNSS o GPS
Cinemático en
tiempo real
Preciso de puntos PPP
Constelaciones GNSS
Técnica inercial
Operación remota
Robot
Movil
Interfaz
Control remoto
Comunicación de
datos
Enlace serial
Opciones
Modem de radio
semiduplex
Características
UPC
Memoria
Interfaces
Temperatura
Carta gráfica