Sistemas Mecánicos
Mecanismo
Es
Los mecanismos son elementos destinados a transmitir y/o transformar fuerzas y/o movimientos desde un elemento motriz (motor) a un elemento conducido (receptor), con la misión de permitir al ser humano realizar determinados trabajos con mayor comodidad y menor esfuerzo.1
Ejemplo

Figura1: Mecanismo
Máquinas
Un conjunto de partes o componentes vinculados entre sí, de los cuales al menos uno es móvil, asociados para una aplicación determinada, provisto o destinado a estar provisto de un sistema de accionamiento distinto de la fuerza humana o animal.2
Se divide en dos tipos

Figura2: Máquinas simples
Figura3: Máquinas compuestas
Eslabón
Definición
En un mecanismo se denomina eslabón a cada uno de los sólidos rígidos que lo componen y que se conectan entre sí a través de pares cinemáticos.3
Ejemplo

Figura4: Eslabón
Cadena Cinemática
Es
Conjunto de elementos mecánicos unidos entre sí por medio de acoplamientos esféricos o cilindricos.4

Figura5: Cadena cinemática
Sus tipos son
Cadena cinematica abierta
Es definida desde la biomecánica como la combinación de varias articulaciones para la realización de un movimiento, el cual es libre en el extremo distal del segmento, mientras que el extremo proximal se encuentra fijo.5
Figura6: Cadena cinemática abierta
Cadena cinemática cerrada
Se define como el conjunto de movimientos donde la parte distal y proximal están fijas, y el resto del cuerpo se desplaza.6
Figura7: Cadena cinemática cerrada
Par Cinemático
Definición
Puede definirse como la unión móvil de dos cuerpos o elementos, cuyo movimiento relativo queda mutuamente limitado. Un conjunto de piezas rígidamente unidas entre sí constituye un eslabón de un mecanismo.7
Figura8: Par cinemático
Tipos
Primera clase
dispone de un grado de libertad7
Changes
Dispone de dos grados de libertad y así sucesivamente7
Grados de libertad
En mecánica hamiltoniana el número de grados de libertad de un sistema coincide con la dimensión topológica del espacio de fases del sistema. En mecánica lagrangiana el número de grados de libertad coincide la dimensión del fibrado tangente del espacio de configuración del sistema..8
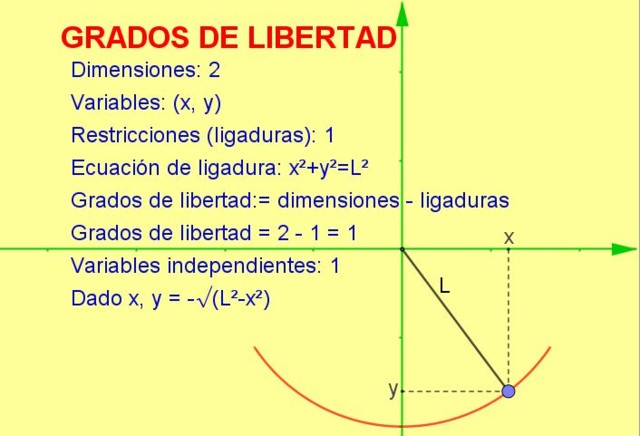
Figura9: Grados de libertadundefined
Tipos de apoyos

Figura10: Tipos de apoyos
Reacciones

Figura11; Reacciones
Centro instantaneo de rotación
se define como el punto del cuerpo o de su prolongación en el que la velocidad instantánea del cuerpo es nula.9
Figura 12 Centro de rotación
Par de rodadura
Se trata de una fuerza que se opone al movimiento de rodadura y es originada cuando el cuerpo que rueda sobre una superficie se deforma, o es la superficie la que se deforma, o pudiera ser que sean ambos a la vez los que se deforman. Esta deformación, aunque sólo sea ligera, es producto de las presiones existentes en los puntos de contacto entre el cuerpo rodante (la rueda) y la superficie de rodadura (el asfalto).10

Figura13: Par de rodadura