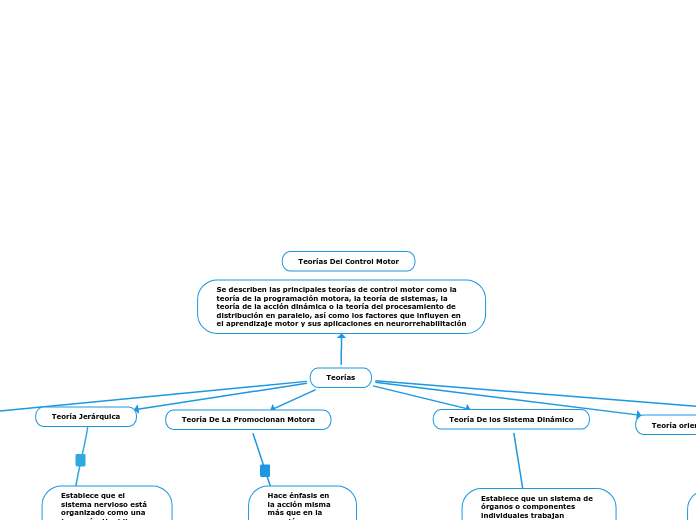
Teorías Del Control Motor
Teorías
Teoría Jerárquica
Establece que el sistema nervioso está organizado como una jerarquía. Hughlings Jackson medico inglés, decía que el cerebro tienen niveles de control, superior, medio e inferior, que corresponde a las áreas de asociación superiores, a la corteza motora y a los niveles espinales de función motora (nervios) respectivamente. En una estricta jerarquía vertical, las líneas de control no se cruzan y los niveles inferiores nunca ejercen control
Limitaciones: No explica que un reflejo que se encuentra dentro del nivel inferior de la jerarquía es el que domine la función motora (reflejo de retirada)
Teoría De La Promocionan Motora
Hace énfasis en la acción misma más que en la reacción como en las teorías anteriores. Se han realizado diversos estudios que avalan esta teoría, el término “programación motora” hace referencia a un circuito neuronal que tiene una función específica, estereotipada y que ningún factor externo e interno pueden modificar.
Limitaciones: El concepto de programa motor no considera que el SNC deba tener en cuenta variables musculoesqueléticas y ambientales para lograr el control del movimiento. Comandos similares producirán movimientos distintos según varíen estas variables
Teoría De los Sistema Dinámico
Establece que un sistema de órganos o componentes individuales trabajan colectivamente para un fin en común. Sin necesidad de un órgano que coordine cierta acción; el movimiento surge de la interacción de estos componentes, sin la necesidad de un comando o un órgano que regule la acción realizada.
Actualmente no hay una teoría que sustente todos los factores, causa y naturaleza del movimiento. Siendo la mejor opción sustraer los aspectos importantes de cada teoría y continuar con investigación que arroje resultados confiables y comprobables.
Limitaciones: Supone que la relación entre el sistema físico del sujeto y el ambiente donde opera determina principalmente su comportamiento
Teoría Refleja
Propuesta en 1900 por Sir Charles Sherrington, aclamado neurofisiologo y nobel de medicina en 1932. Para Sherrington, los reflejos eran los componentes básicos del comportamiento moto; trabajaban juntos o en secuencia, para lograr un propósito común. La concepción de un reflejo requiere tres estructuras diferentes: un receptor, una vía nerviosa conductiva y un efector
Limitaciones: La consideración del reflejo como unidad básica del comportamiento no explica los movimientos espontáneos ni los voluntarios como formas aceptables de conducta
No explica tampoco que un solo estímulo pueda resultar en respuestas variadas que dependen de un contexto y de los comandos descendentes o la capacidad de realizar movimientos nuevo
Teoría orientada A Las Actividades
indicó la necesidad de una teoría que explicase cómo los circuitos neuronales operaban para lograr una acción, lo que proporcionaría la base para una imagen más coherente del sistema motor. El método orientado a la actividad se apoya en el reconocimiento de que el objetivo del CM es el dominio del movimiento para realizar una acción particular, no para efectuar movimientos por el solo hecho de moverse. El control del movimiento se organizaría alrededor de comportamientos funcionales dirigidos a objetivos
Limitaciones: No informa sobre cuáles son las actividades fundamentales del SNC y los elementos esenciales que se controlan en una acción
Teoría Del Medio Ambiente
explora la forma en que nuestros sistemas motores nos permiten interactuar más efectivamente con el medio ambiente a fin de tener un comportamiento orientado al objetivo. Su investigación se centró en cómo detectamos la información del entorno pertinente para nuestras acciones y cómo la utilizamos para controlar nuestros movimientos. El individuo explora activamente su entorno, el cual, a su vez, sostiene la actividad del individuo, de tal manera que las acciones están orientadas al ambiente.
Limitaciones: Enfatiza poco en la organización y función del sistema nervioso