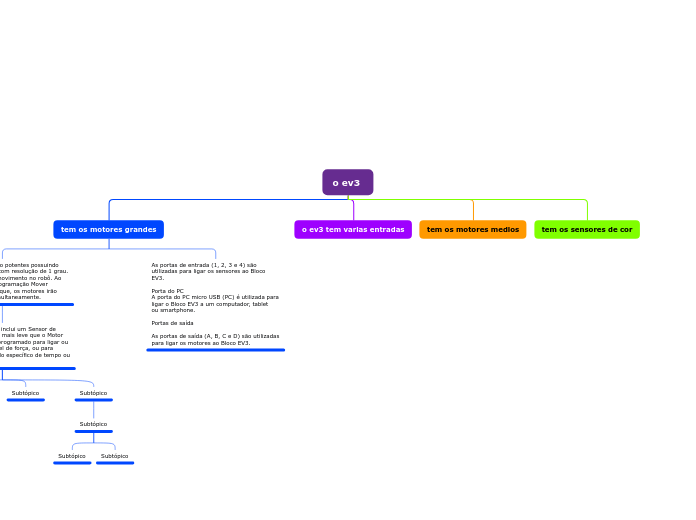
o ev3
tem os motores grandes
Os motores grandes são potentes possuindo
um sensor de rotação com resolução de 1 grau.
São estes que geram movimento no robô. Ao
utilizar os Blocos de Programação Mover
direção ou Mover o tanque, os motores irão
coordenar as ações simultaneamente.
O Motor Médio também inclui um Sensor de
Rotação mas é menor e mais leve que o Motor
Grande. Este pode ser programado para ligar ou
desligar, controlar o nível de força, ou para
funcionar por um período específico de tempo ou
de rotações.
O sensor de cor deteta a cor ou a intensidade da luz
que entra pela pequena janela no topo do sensor.
Este sensor pode ser usado de três modos diferentes:
Modo de cor, Modo de intensidade da luz refletida e
Modo de intensidade da luz ambiente.
- Modo de Cores
O Sensor de Cor reconhece sete cores: preto, azul, verde,
amarelo, vermelho, branco e castanho e ainda a ausência
de cor, sendo possível programá-lo para dizer o nome
das mesmas.
- Modo da intensidade da luz refletida
O sensor de cor deteta a intensidade da luz refletida a partir
de uma lâmpada vermelha emissora de luz. O sensor utiliza
uma escala que vai de 0 (muito escuro) até 100 (muita luz).
Como exemplo, o robô pode ser programado para seguir uma
linha preta sobre uma superfície branca.
- Modo da intensidade da luz ambiente
O sensor mede a força da luz que entra pela janela vinda do
ambiente. O sensor utiliza uma escala que vai de 0 (muito
escuro) até 100 (muita luz). Como exemplo, o robô pode ser
programado para disparar um alarme quando o sol nasce, ou
interromper uma ação quando as luzes se apagam.
Dados Tipo Alcance Notas
Cor Numérico 0 - 7
Usado no modo cor
0 = sem cor; 1 = preto; 2 = azul, 3 = verde; 4 =
amarelo; 5 = vermelho; 6 = branco; 7 = castanho
Subtópico
Subtópico
Subtópico
Subtópico
Subtópico
As portas de entrada (1, 2, 3 e 4) são
utilizadas para ligar os sensores ao Bloco
EV3.
Porta do PC
A porta do PC micro USB (PC) é utilizada para
ligar o Bloco EV3 a um computador, tablet
ou smartphone.
Portas de saída
As portas de saída (A, B, C e D) são utilizadas
para ligar os motores ao Bloco EV3.