Mecanismes
Què són els mecanismes?
Son dispositius que reben una energia d’entrada i a través d’un
sistema de transmissió i/o transformació del realitzen un treball.
A partir del que fan amb el moviment d’entrada, els mecanismes els podem dividir
en dos grans grups:
Mecanismes de transformació del moviment
Són aquells mecanismes en els que el moviment que hi ha a l’entrada del
mecanisme és distint al que es troba a l’eixida d’este.
Segons els tipus de moviment que intervenen els podem classificar en:
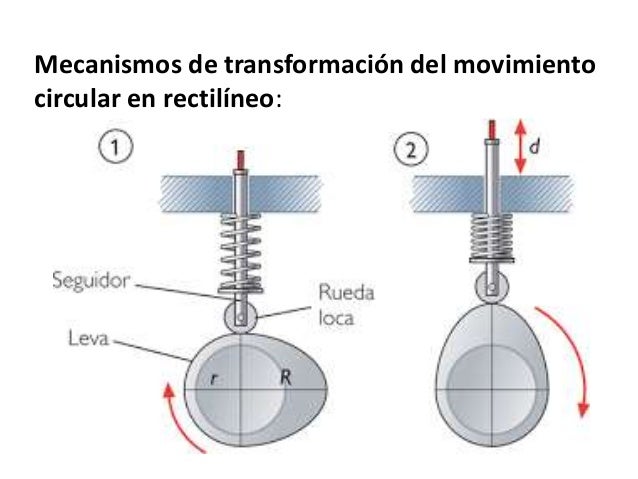
Mecanismes de transformació del moviment circular en rectilini:
• El pinyó-cremallera.
• El caragol-femella.
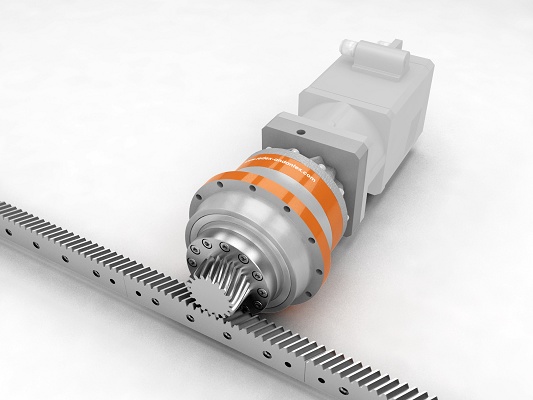
El pinyó-cremallera
Mecanisme constituït per una roda dentada anomenada pinyó i per una
barra dentada denominada cremallera que encaixa amb el pinyó.
Es tracta d’un mecanisme reversible perquè quan el pinyó gira, la
cremallera es desplaça amb moviment rectilini, però també es pot
transformar el moviment rectilini de la cremallera en circular del pinyó.
Aplicacions: Trepants de columna, direcció dels automòbils, llevataps, etc.
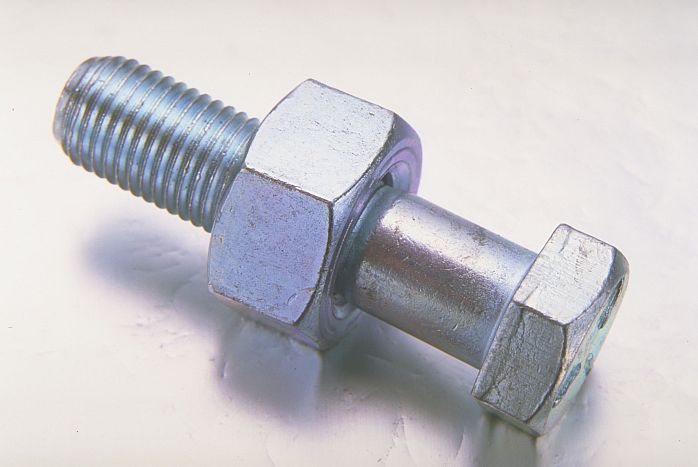
El caragol-femella
Mecanisme constituït per una vareta roscada anomenada caragol i per
una femella amb un diàmetre interior idèntic al diàmetre del caragol.
Quan el caragol gira, i es manté fixada la femella, esta avança amb
moviment rectilini per l’eix de la vareta roscada i viceversa, si gira la
femella i es manté aquesta en la mateixa posició, el caragol es desplaça en
moviment rectilini.
No es tracta d’un sistema reversible perquè mai el moviment rectilini es
podrà transformar en circular amb este mecanisme.
Aplicacions: Element d’unió en premses, gats dels automòbils, etc.
Mecanismes de transformació del moviment circular en rectilini
alternatiu:
• La Biela-manovella i el cigonyal.
• La lleva.
• La roda excèntrica.
La biela-manovella
Mecanisme compost per dos elements units mitjançant una articulació:
• Manovella: És una barra rígida que es troba articulada per un dels
seus extrems amb la biela i per l’altre està unida a un eix de gir.
• Biela: És una barra rígida que es troba articulada per un dels seus
extrems amb la manovella i per l’altre està articulada amb un
element que realitza un moviment rectilini, l’èmbol.
Quan la manovella gira, es transmitix el moviment circular a la biela que
el transforma en un moviment de vaivé a l’èmbol.
El cigonyal
Es tracta d’una evolució de la biela-manovella on s’han col·locat un sèrie
de bieles en un mateix eix amb colzes (eix colzat), on cadascun dels
colzes fan la funció de la manovella.
El cigonyal transforma el moviment circular de l’eix colzat en diferents
moviments rectilinis alternatius descompassats de les diferents bieles.
Al igual que la biela-manovella és reversible, ja que el moviment de
vaivé de les bieles es pot transformar en moviment circular en l’eix
colzat.
La lleva-seguidor
Es tracta d’una roda que té una part que sobreïx i que espenta al seu pas
a una peça anomenada seguidor.
D’esta forma la lleva transforma el moviment de rotació de la roda en un
moviment rectilini alternatiu en el seguidor a mesura que la lleva va
girant. Es tracta d’un sistema no reversible, ja el moviment de vaivé del
seguidor no es pot transformar en moviment circular en la lleva.
El sistema format per un conjunt de lleves situades sobre un mateix eix es denomina arbre de lleves.
Les aplicacions de la lleva o del arbre de lleves són:
• Motors de combustió per a regular de forma automàtica l’apertura i el tancament de les vàlvules que permeten l’entrada i eixida del combustible.
• Programador de la rentadora: Aquells programadors que no són electrònics.
La roda excèntrica-seguidor
Es tracta d’una roda en el que el seu eix de gir no coincidix amb el centre
de la circumferència.
Transforma el moviment de rotació de la roda en un moviment rectilini
alternatiu en el seguidor a mesura que la roda excèntrica va girant.
Es tracta d’un sistema no reversible, ja el moviment de vaivé del
seguidor no es pot transformar en moviment circular en la roda
excèntrica.
Les aplicacions de la roda excèntrica són similars a les de la lleva o del
arbre de lleves.

En els mecanismes podem trobar tres tipus diferents de moviments:
Moviment circular o rotatori, com en d’una roda.
Moviment lineal o rectilini, com el de una porta corredera.
Moviment alternatiu, és un moviment d’anada i tornada, un vaivé, com el
del capçal d’una maquina de cosir.
Relació de transmissió(Rt)
És la relació existent entre l’entrada (o element motriu) i l’eixida (element conduit)
del mecanisme de transmissió del moviment. Es pot calcular a partir de diferents
dades depenent del tipus de mecanisme que es tracte.
Si es disposa de les
velocitats d’entrada (ne) i
sortida (ns) del sistema en
revolucions per minut
(rpm)
Exemple:
Si ne = 25 rpm i ns = 100
rpm
Rt=ns/ne
Exemple:
Si De = 75 cm i Ds = 300
cm
Rt=De/Ds
La relació de transmisio no té una unitat de mesura.
Es disposa d’un sistema
d’engranatges on les dades
són els número de dents (Z)
de cada engranatge.
Ze – Número de dents de la
roda dentada motriu o
d’entrada.
Zs - Número de dents de la
roda dentada conduïda o de
sortida.
Exemple:
Si Ze = 10 i Zs = 50
Rt= Ze/Zs
Tipus de sistemes de mecanismes de transmissió del moviment segons la
Relació de transmissió (RT)
Sistemes Multiplicadors: Són aquells sistemes que tenen una RT > 1.
La velocitat a l’eixida del sistema és sempre major que la que ens trobem a
l’entrada d’este.
Sistemes Reductors: Són aquells sistemes que tenen una RT < 1.
La velocitat a l’eixida del sistema és sempre menor que la que ens trobem a
l’entrada d’este.
Sistemes Mantenidors: Són aquells sistemes que tenen una RT = 1.
La velocitat a l’eixida del sistema és sempre igual que la que ens trobem a
l’entrada d’este. Es tracta de sistemes on generalment es busca realitzar un
canvi de sentit en el moviment sense afectar a la seua velocitat.
Relació de transmissió
Tipus
Sistema de politges.
Es disposa d’un sistema de
politges on les dades són els
diàmetres (D) d’estes.
De – Diàmetre de la politja
motriu o d’entrada.
Ds - Diàmetre de la politja
conduïda o de sortida.
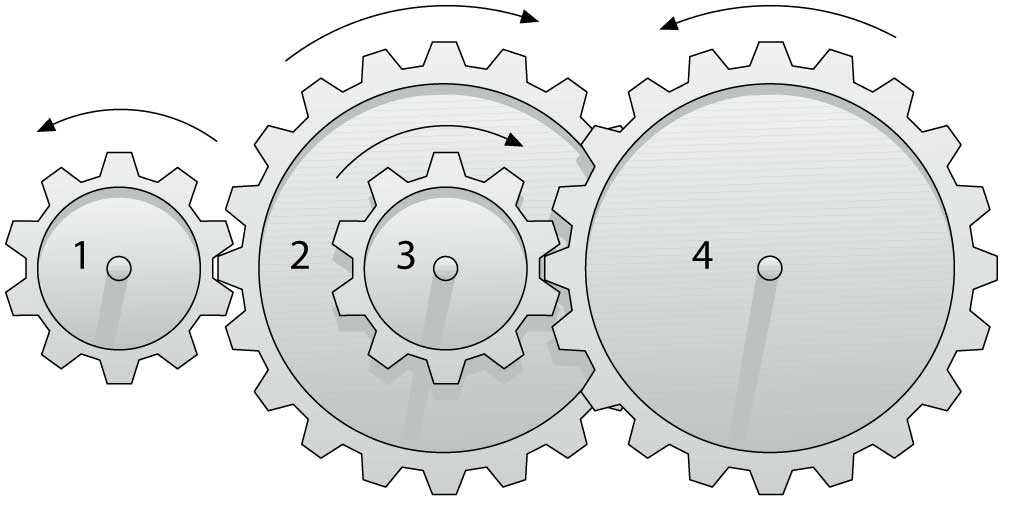
Sistema d'engranatges

Tren d’engranatges
És un sistema format per mes de dos engranatges. Existixen dos tipus de trens
d’engranatges:
Simple: Format per rodes que engranen entre si en el mateix plànol. De
vegades s’utilitza una roda denominada “boja” que es situa entre dos rodes
d’un sistema d’engranatges i que té com a missió variar el sentit de gir de la
roda arrossegada sense afectar a la relació de transmissió del sistema.
Compost: Format per rodes que engranen dos a dos.
Caragol sense fi
Sistema de transmissió del moviment format per dos elements que engranen entre si:
• Caragol sense fi: Peça cilíndrica que disposa d’una o mes ranures o filets
enrotllats de forma helicoïdal.
• Corona: Roda dentada amb dents que engranen les ranures del caragol
sense fi.
Mecanismes de transmissió del moviment
Per a calcular la relació de transmissió en un tren d’engranatges s’ha de seguir els
següents passos:
Identificar quina és la roda motriu i per tant, la direcció de transmissió del
moviment.
Punt de fricció - Rtp1= Ze/Zs= Z1/Z2
Punt de fricció - Rtp2= Ze/Zs= Z3/Z4
Localitzar els punts de fricció entre les rodes. Per cada punt de fricció que
afecta a dos rodes es calcula una relació de transmissió parcial com si sols
existiren eixes dos rodes i ignorant la resta.
La relació de transmissió total del sistema ve donada pel producte de totes
les relacions parcials que té el sistema.
RtpTotal=Rtp1 · Rtp2 · Rtp3 ·..... (depen dels que hi hagen)
En este tipus de mecanisme el caragol sempre actua com a element motriu i la
corona com l’element arrossegat.
Per tant la relació de transmissió en un caragol sense fi és:
RT= Ze/Zs = Zcaragol/Zcorona
Zcaragol - Número de ranures que
engranen completament amb les dents
de la corona
Zcorona - Número de dents de la corona