Unit 7:
Cartesian Vectors
Algebraic Vectors: 2D
Geometric Vectors:
Vectors with no fixed location
Is written as a magnitude + a direction
e.g., a --> |a| = 2km [N26°E]
Algebraic Vectors
Vectors drawn on a coordinate plane,
the tail is at the origin (0,0)
Can be written using polar coordinates:
angle is measured from the terminal arm
(positive x-axis)
Can be written using Cartesian coordinates:
- in coordinates form
- in unit vectors form (also known as component form)
coordinates form:
e.g., a = (3, 5)
unit vector form:
e.g., a = 3î + 5ĵ
î = unit vector of x-axis (1,0)
ĵ = unit vector of y-axis (0,1)
î and ĵ are also known as
the vector components
To calculate the magnitude,
use the Pythagorean Theorem:
a² + b² = c²
Algebraic Vectors: 3D
Vectors in R²
u = any vector in the plane, but position
it so that its tail is at the origin and its
head is at some point P(a,b)
u can also be interpreted as
the position vector, written
as u = OP = (a,b)
(a, b) are known as the
scalar components
and has 2 meanings:
1) the coordinates of some
point P in the plane
2) the position vector
of the point P
P (position vector) starts at the
origin, and ends at any other
random point
let u = r
the coordinates of P (a,b)
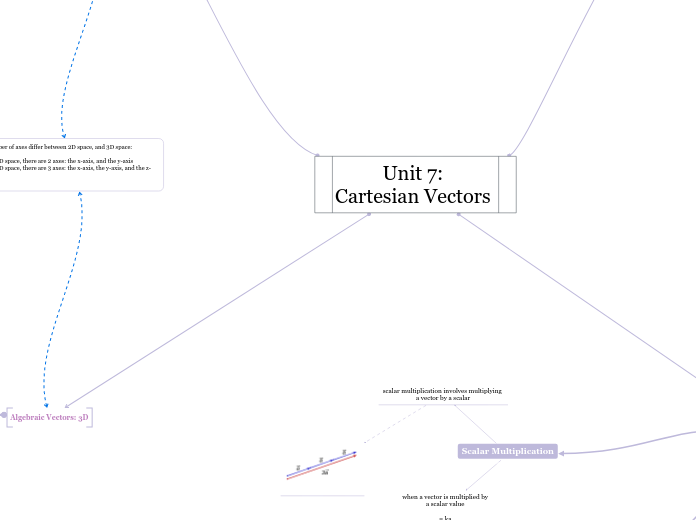
Vectors in R³
Points in 3D space can be described using
ordered triples of real numbers
u = any vector in 3-space but position
it so that its tail is at the origin and its
head is at some point P(a,b,c)

(a, b, c) has 2 meanings:
1) the coordinates of some
point P in space
2) the position vector of
point P
Assigned coordinates (a,b,c)∈R³
How to go from O to P?
1) we go a units in the
x-direction
2) we go b units in the
y-direction
3) we go c units in the
z-direction
The unit vectors in 3-space are called the
standard basis vectors: î, ĵ, and k̂
Written as:
î = (1, 0, 0)
ĵ = (0, 1, 0)
k̂ = (0, 0, 1)
Finding magnitude in 3-space:
| u | = √a² + b² + c²
Applications
Cross Product:
Torque:
Think of it as a physical quantity that describes the
rotational of turning effort of a force
Formula:
τ = |r × F|
τ = |r||F|sinθ
F is the applied force
measured in Newtons (N)
r is the vector determined by the
lever arm from the axis of rotation
measured in metres (m)
θ is the angle between the
force and the lever arm
Dot Product
Work:
The product of the magnitude of the displacement travelled by an object, and the magnitude of the force applied in the direction of the motion
Measured in Joules, where 1 J = 1 N⋅m
Formula:
W = F⋅d
W= |F||d|cosθ
Projection:
Think of projection like a shadow, where the projection of v onto u is the shadow that v casts on u

Vector Projection:
|projᵤv| = (v⋅u/|u||u|)u
|projᵥu| = (u⋅v/|v||v|)v
Scalar projection tells us
about the magnitude of
the projection
Scalar Projection:
|projᵤv| = |v|cosθ
Determining the Angle Between 2 Vectors:
Formula:
cosθ = u⋅v/|u||v|
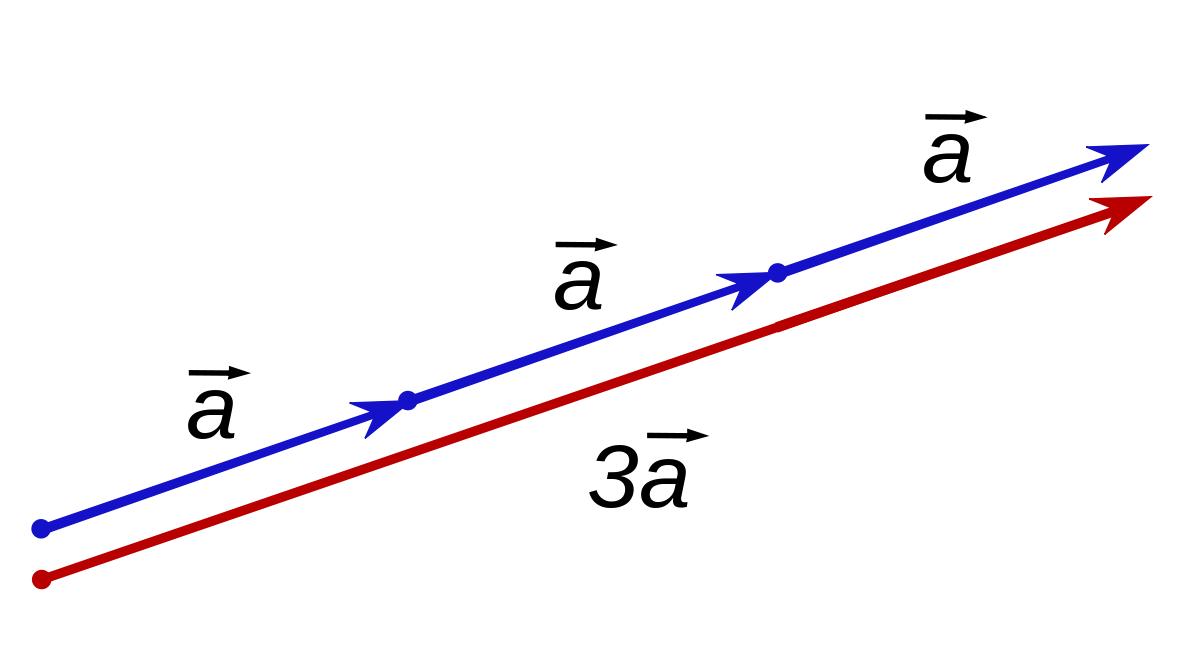
3 Ways to Multiply Vectors
Scalar Multiplication
when a vector is multiplied by
a scalar value
= ka
scalar multiplication involves multiplying
a vector by a scalar
Dot Product
Formula:
a ⋅ b = |a||b|cosθ
the angle is between the 2 vectors
the result of the dot product
is a scalar
a and b are two non-zero vectors
arranged tail-to-tail forming an angle
Different Types of Cases:
Case 1: θ is 0 degrees
e.g., |a| = 10, |b| = 4, θ = 0 degrees
a ⋅ b = |a||b|cosθ
a ⋅ b = 10(4)cos0
a ⋅ b = 10(4)(1)
a ⋅ b = 40 units
cos0 on the unit circle = 1
Case 2: θ is acute
e.g., |a| = 10, |b| = 4, θ = 60 degrees
a ⋅ b = |a||b|cosθ
a ⋅ b = 10(4)cos60
a ⋅ b = 10(4)(1/2)
a ⋅ b = 20 units
cos60 on the unit circle = 1/2
As a result, the dot product between
a and b will always greater
than zero (positive) if the angle is
less than 90 degrees
Case 3: θ is 90 degrees
e.g., |a| = 10, |b| = 4, θ = 90 degrees
a ⋅ b = |a||b|cosθ
a ⋅ b = 10(4)cos90
a ⋅ b = 10(4)(0)
a ⋅ b = 0 units
cos90 on the unit circle = 0
Under this case, the vectors are
perpendicular/orthogonal.
As a result, the dot product between
aand b will always be zero if the
angle is 90 degrees
Case 4: θ is obtuse
e.g., |a| = 10, |b| = 4, θ = 150 degrees
a ⋅ b = |a||b|cosθ
a ⋅ b = 10(4)cos150
a ⋅ b = -34.64 units
cos90 on the unit circle = -√3/2
As a result, the dot product between
a and b will always less than
zero (negative) if the angle is
greater than 90 degrees
Cartesian Vectors of the Dot Product:
in R² --> a ⋅ b = a₁b₁ + a₂b₂
in R³ --> a ⋅ b = a₁b₁ + a₂b₂ + a₃b₃
Properties of the Dot Product:
u ⋅ v = 0 when the vectors
are perpendicular to each other
Commutative Property:
u ⋅ v = v ⋅ u
For any vector u:
u ⋅ u = |u|²
Associative Property:
(ku) ⋅ v = k(u ⋅ v) = u ⋅(kv)
Distributive Property:
u(v ⋅ w) = u ⋅ v + u ⋅ w
Cross Product
Formula:
a × b = |a||b|sinθ n
the angle is between the 2 vectors
Determining the Angle Between 2 Vectors:
Formula:
θ = sin⁻¹(|a×b|/|a||b|)
the result of the cross product
is a vector
n is the unit vector perpendicular to both a and b
A vector called the "cross product", has a magnitude equal to the area of the parallelogram the 2 vectors create, and is perpendicular to the 2 vectors.

The Right Hand Rule:
it's used to determine the direction of the
cross product vector
1) index finger is the direction of the 1st vector (a)
2) middle finger is the direction of the 2nd vector (b)
3) the direction where the thumb points gives the
direction of a×b
Cartesian Vectors of the Cross Product:
a × b = [a₂b₃ - a₃b₂, a₃b₁ - a₁b₃, a₁b₂ - a₂b₁]
a × b = (a₂b₃ - a₃b₂)î + (a₃b₁ - a₁b₃)ĵ + (a₁b₂ - a₂b₁)k̂
Properties of the Cross Product:
if u and v are non-zero, u×v 0
only if there's a scalar such as
u = mv
(u+v) × w = u × w + v × w
u × v = -(v × u)
Associative Property:
k(u×v) = (ku)×v = u×(kv)
Distributive Property:
u×(v + w) = u × v + u × w
Volume of a Parallelepiped
Formula:
V = A(base) ⋅ height
V = |a ⋅ (b×c)|
