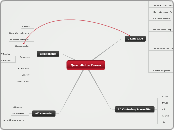
Quad-Rotor Drone
C Language
Include Header Files
Initialize Global Variables
Call Initialization Function
Calibrate Sensors
Main Function Loop
Call Control Sequence
Transmit Status
Initialization Function
Initialize CPU Clock
Initialize uC Pins
Initialize Interrupts
Control Sequence
Read incoming PWM
Compare to Previous Heading
Use Delta to Determine Severity Of Manuver
RE Controller/Transmitter
Crystal
thrust
roll
Aileron
Tilt
Components
Chassis
Motor Controllers x 4
Brushless Motors x 4
Microcontroller
Propellers
CW Rotation
CCW Rotation
RF Receiver
Sensors
Power Supply
wifi controller
wifi antenna
wifi interface
Android programming